LLM Reasoner and Automated Planner: A new NPC approach
作者: Israel Puerta-Merino, Jordi Sabater-Mir
分类: cs.AI
发布日期: 2025-01-17
备注: 15 pages, 7 figures, extended version of the homonymous paper submitted to the Catalan Conference on Artificial Intelligent (CCIA) 2025
DOI: 10.3233/FAIA240443
💡 一句话要点
提出LLM推理器与自动规划器结合的新型NPC架构,提升智能体决策能力
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 大型语言模型 自动规划 智能体 决策 类人行为
📋 核心要点
- 传统行为树等方法在模拟类人行为的智能体设计中存在局限性,难以应对未预见的情况。
- 利用LLM生成类人决策,并结合经典自动规划器生成可靠计划,提升智能体决策的合理性和可靠性。
- 该方法旨在使智能体在各种情境下都能做出决策,即使这些情境在设计阶段未被考虑。
📝 摘要(中文)
在需要智能体模拟类人行为的领域,如形成性模拟,传统的行为树等技术面临挑战。大型语言模型(LLM)虽然不总能产生最优解,但通常能对给定问题提供合理且类人的响应。本文利用LLM的这一能力,提出了一种新颖的架构,该架构集成了用于决策的LLM和一个可以为该决策生成可靠计划的经典自动规划器。这种结合旨在使智能体能够在各种情况下做出决策,即使这些情况在设计阶段没有被预料到。
🔬 方法详解
问题定义:论文旨在解决在需要智能体模拟类人行为的场景中,传统方法(如行为树)难以应对未预见情况的问题。现有方法的痛点在于其预定义的行为模式无法适应复杂和动态的环境,导致智能体的行为缺乏灵活性和泛化能力。
核心思路:论文的核心思路是结合LLM的推理能力和经典自动规划器的规划能力。LLM负责生成类人且合理的决策,而自动规划器则负责为这些决策生成可执行的计划。通过这种结合,智能体既能表现出类似人类的决策行为,又能保证决策的可行性和可靠性。
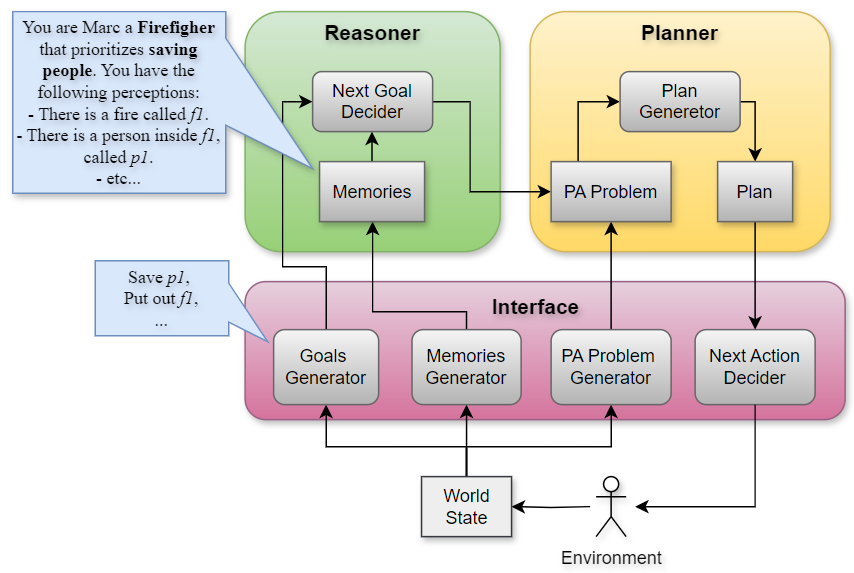
技术框架:整体架构包含两个主要模块:LLM推理器和自动规划器。首先,LLM接收环境信息和目标,生成一个决策。然后,自动规划器接收该决策作为目标,并生成一个实现该决策的计划。最后,智能体执行该计划。整个流程可以迭代进行,根据环境变化和执行结果不断调整决策和计划。
关键创新:最重要的技术创新点在于将LLM的决策能力与经典自动规划器的规划能力相结合。与传统方法相比,该方法能够使智能体在未预见的情况下做出合理的决策,并生成可执行的计划。这种结合提高了智能体的灵活性、适应性和泛化能力。
关键设计:论文中未明确提及关键的参数设置、损失函数、网络结构等技术细节。LLM的选择和配置,以及自动规划器的具体算法,可能会影响最终效果。具体实现细节未知。
🖼️ 关键图片


📊 实验亮点
论文主要提出了一个架构,并没有给出具体的实验结果和性能数据。因此,无法总结具体的性能数据、对比基线、提升幅度等实验亮点。该研究的价值在于提供了一种新的智能体设计思路,为未来的研究提供了方向。
🎯 应用场景
该研究成果可应用于各种需要智能体模拟类人行为的领域,如游戏AI、虚拟助手、教育模拟和军事训练等。通过结合LLM的推理能力和自动规划器的规划能力,可以创建更智能、更灵活、更适应环境的智能体,从而提高这些应用的真实感和实用性。未来,该方法有望在人机交互、智能决策等领域发挥重要作用。
📄 摘要(原文)
In domains requiring intelligent agents to emulate plausible human-like behaviour, such as formative simulations, traditional techniques like behaviour trees encounter significant challenges. Large Language Models (LLMs), despite not always yielding optimal solutions, usually offer plausible and human-like responses to a given problem. In this paper, we exploit this capability and propose a novel architecture that integrates an LLM for decision-making with a classical automated planner that can generate sound plans for that decision. The combination aims to equip an agent with the ability to make decisions in various situations, even if they were not anticipated during the design phase.