LLM-Ehnanced Holonic Architecture for Ad-Hoc Scalable SoS
作者: Muhammad Ashfaq, Ahmed R. Sadik, Tommi Mikkonen, Muhammad Waseem, Niko Mäkitalo
分类: cs.AI, cs.ET, cs.MA, cs.SE
发布日期: 2025-01-14
💡 一句话要点
提出LLM增强的Holonic架构,用于自适应可扩展的SoS系统,解决互操作性与重配置难题。
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: Holonic架构 系统工程 大型语言模型 智能系统 自适应系统
📋 核心要点
- 传统SoS架构难以满足日益增长的自适应性和以人为本的需求,在互操作性、重配置和人机交互方面存在挑战。
- 论文提出了一种LLM增强的Holonic架构,通过分层Holon设计和专用Holon引入,提升SoS的适应性和可重构性。
- 通过智能城市交通的3D移动案例研究,验证了该方法在复杂多模式SoS环境中的潜力,并提出了架构评估方法。
📝 摘要(中文)
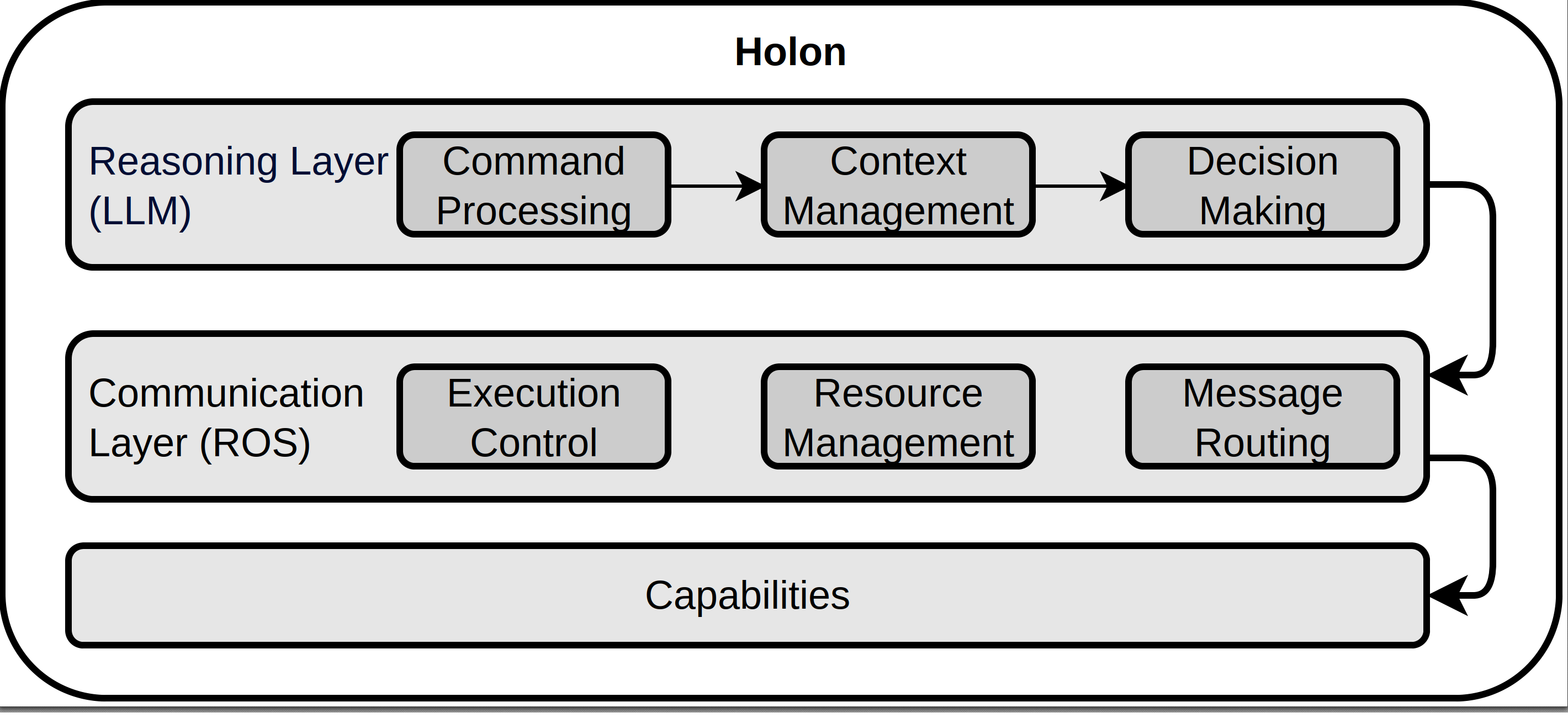
本文针对现代SoS系统日益增强的自适应性和以人为本的特性,传统架构难以支持互操作性、重配置和有效的人机交互等问题,提出了一种先进的Holonic架构。主要贡献包括:一是提出了Holon的分层架构,包含推理、通信和能力层,通过改进数据交换和集成,促进异构组成系统之间的无缝互操作性。二是引入了受智能制造原则启发的专用Holon,即监督者、规划者、任务和资源Holon,旨在增强SoS的适应性和重配置能力。这些专用Holon在其推理层中利用大型语言模型来支持决策并确保实时适应性。通过一个以智能城市交通为中心的3D移动案例研究,展示了该方法在管理复杂的多模式SoS环境中的潜力。此外,还提出了评估架构效率和可扩展性的方法,为未来通过模拟和实际实施进行实证验证奠定了基础。
🔬 方法详解
问题定义:现代SoS系统变得越来越复杂和动态,传统的系统架构难以有效地支持异构系统之间的互操作性、快速重配置以适应变化的需求,以及有效的人机交互。现有的架构在处理大规模、分布式的SoS时,面临着可扩展性、灵活性和实时决策的挑战。
核心思路:论文的核心思路是借鉴Holonic架构的优势,并结合大型语言模型(LLM)的推理能力,构建一个更加智能、自适应和可扩展的SoS架构。通过将系统分解为自治的Holon单元,并利用LLM进行决策和规划,实现系统的动态重配置和优化。
技术框架:该架构采用分层Holon设计,包括推理层(利用LLM进行决策)、通信层(负责Holon之间的信息交换)和能力层(提供Holon的功能)。此外,还引入了四种专用Holon:监督者Holon(负责全局监控和协调)、规划者Holon(负责制定任务计划)、任务Holon(负责执行具体任务)和资源Holon(负责管理可用资源)。这些Holon协同工作,实现SoS的自组织和自适应。
关键创新:该论文的关键创新在于将大型语言模型集成到Holonic架构的推理层中,使Holon具备了更强的决策能力和自适应性。与传统的基于规则或模型的决策方法相比,LLM能够处理更复杂、不确定性更高的场景,并根据实时信息进行动态调整。此外,专用Holon的设计也提高了系统的模块化程度和可重用性。
关键设计:论文中没有详细说明LLM的具体选择和训练方式,以及Holon之间通信协议的具体细节。未来的研究可以进一步探讨LLM的选择、微调策略,以及如何设计高效的Holon通信机制。此外,还需要定义合适的评估指标来衡量架构的性能和可扩展性。
🖼️ 关键图片


📊 实验亮点
论文通过一个智能城市交通的3D移动案例研究,展示了该架构在管理复杂多模式SoS环境中的潜力。虽然没有提供具体的性能数据,但该案例验证了LLM增强的Holonic架构在实际应用中的可行性。此外,论文还提出了评估架构效率和可扩展性的方法,为未来的实证验证奠定了基础。
🎯 应用场景
该研究成果可应用于智能交通系统、智能制造、应急响应系统等领域。通过构建自适应、可扩展的SoS架构,可以更好地管理和优化复杂系统,提高效率、降低成本,并提升系统的鲁棒性和可靠性。未来,该架构有望在智慧城市建设、工业自动化等领域发挥重要作用。
📄 摘要(原文)
As modern system of systems (SoS) become increasingly adaptive and human centred, traditional architectures often struggle to support interoperability, reconfigurability, and effective human system interaction. This paper addresses these challenges by advancing the state of the art holonic architecture for SoS, offering two main contributions to support these adaptive needs. First, we propose a layered architecture for holons, which includes reasoning, communication, and capabilities layers. This design facilitates seamless interoperability among heterogeneous constituent systems by improving data exchange and integration. Second, inspired by principles of intelligent manufacturing, we introduce specialised holons namely, supervisor, planner, task, and resource holons aimed at enhancing the adaptability and reconfigurability of SoS. These specialised holons utilise large language models within their reasoning layers to support decision making and ensure real time adaptability. We demonstrate our approach through a 3D mobility case study focused on smart city transportation, showcasing its potential for managing complex, multimodal SoS environments. Additionally, we propose evaluation methods to assess the architecture efficiency and scalability,laying the groundwork for future empirical validations through simulations and real world implementations.