LLMPC: Large Language Model Predictive Control
作者: Gabriel Maher
分类: cs.AI, cs.CL
发布日期: 2025-01-05 (更新: 2025-02-25)
💡 一句话要点
LLMPC:利用大语言模型进行预测控制,提升规划任务性能
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 大语言模型 模型预测控制 规划 提示工程 机器人 人工智能 决策
📋 核心要点
- 现有方法依赖人工设计的启发式算法,难以适应复杂环境和任务。
- 论文提出将LLM视为隐式成本函数优化器,构建LLMPC框架进行规划。
- 实验表明,LLMPC在多个规划基准测试中优于少量样本提示方法。
📝 摘要(中文)
本文探讨了大型语言模型(LLM)中提示工程技术在模型预测控制(MPC)中的应用。研究表明,当使用规划提示时,LLM实际上充当了隐式的规划成本函数最小化器。因此,本文提出了一个统一的MPC框架,用于利用LLM进行规划,并在多个规划基准测试中展示了优于少量样本提示的性能。
🔬 方法详解
问题定义:现有方法在复杂规划任务中面临挑战,例如,依赖于人工设计的启发式算法,难以泛化到不同的环境和任务。此外,传统MPC方法需要精确的模型,而获取精确模型往往代价高昂。因此,如何利用LLM的强大推理和规划能力,克服传统方法的局限性,是本文要解决的核心问题。
核心思路:本文的核心思路是将LLM视为一个隐式的成本函数优化器。通过精心设计的提示(prompt),引导LLM生成一系列动作序列,这些动作序列可以被认为是LLM在最小化一个未知的、隐式的成本函数。因此,可以将LLM的规划过程视为一个MPC问题,从而利用MPC的框架来优化LLM的规划能力。
技术框架:LLMPC框架主要包含以下几个阶段:1) 状态表示:将当前环境状态编码为LLM可以理解的文本形式。2) 提示构建:根据当前状态和任务目标,构建包含规划指令的提示。3) LLM推理:将提示输入LLM,LLM生成一系列动作序列。4) 成本评估:根据LLM生成的动作序列,评估其对应的成本。5) 优化:使用MPC框架,迭代优化提示,从而优化LLM生成的动作序列。
关键创新:本文最重要的创新点在于将LLM的规划能力与MPC框架相结合。通过将LLM视为隐式成本函数优化器,可以将LLM的规划过程纳入到MPC的优化循环中,从而利用MPC的优化能力来提升LLM的规划性能。这与传统的基于规则或优化的规划方法有本质区别,它利用了LLM的强大先验知识和泛化能力。
关键设计:关键设计包括:1) 提示工程:设计有效的提示,引导LLM生成高质量的动作序列。2) 成本函数设计:设计合适的成本函数,用于评估LLM生成的动作序列的质量。成本函数可以基于任务目标、环境约束等因素进行设计。3) 优化算法选择:选择合适的优化算法,用于迭代优化提示,从而优化LLM生成的动作序列。常用的优化算法包括梯度下降、进化算法等。论文中具体使用的参数设置和损失函数等细节未知。
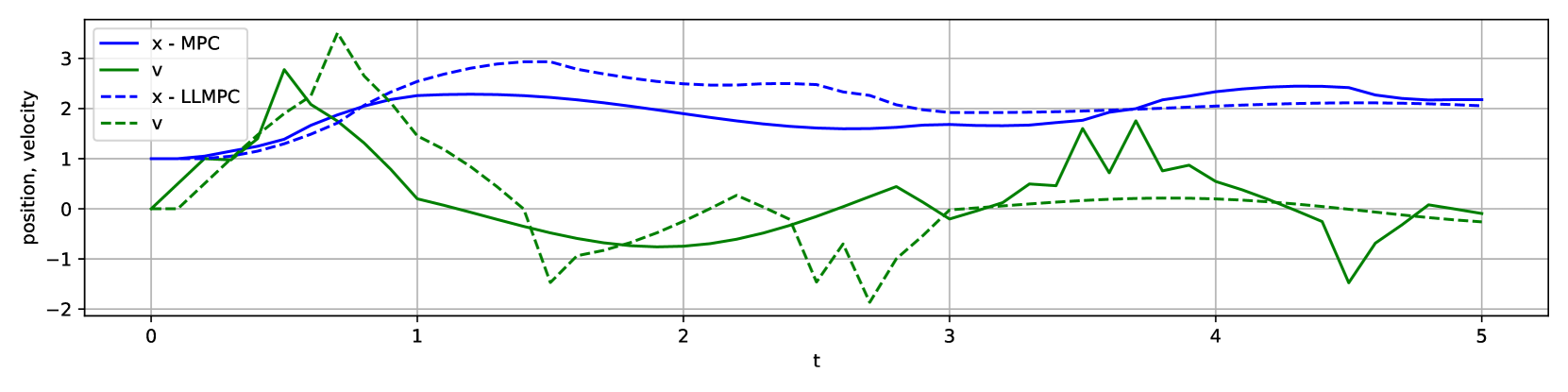
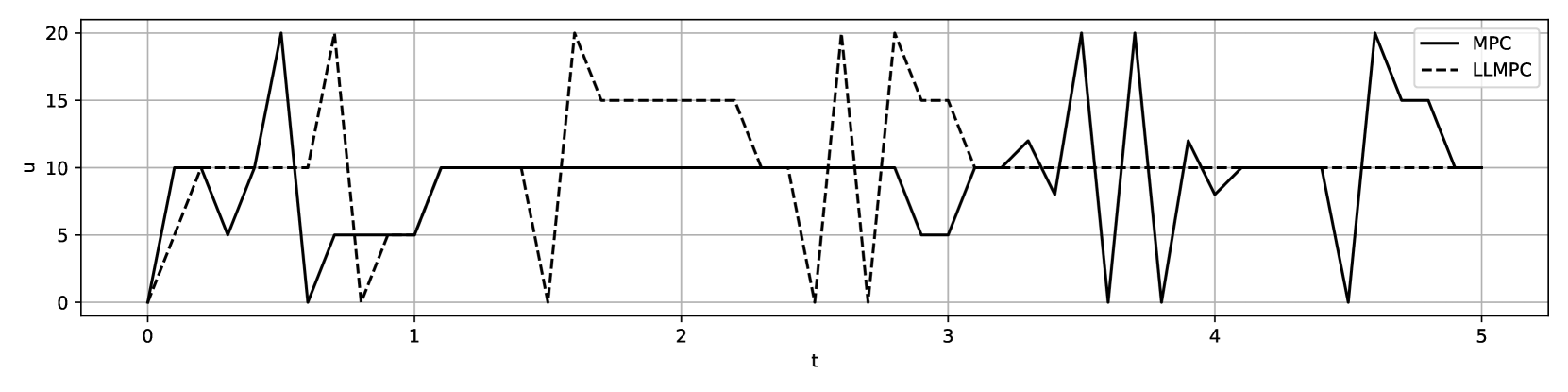
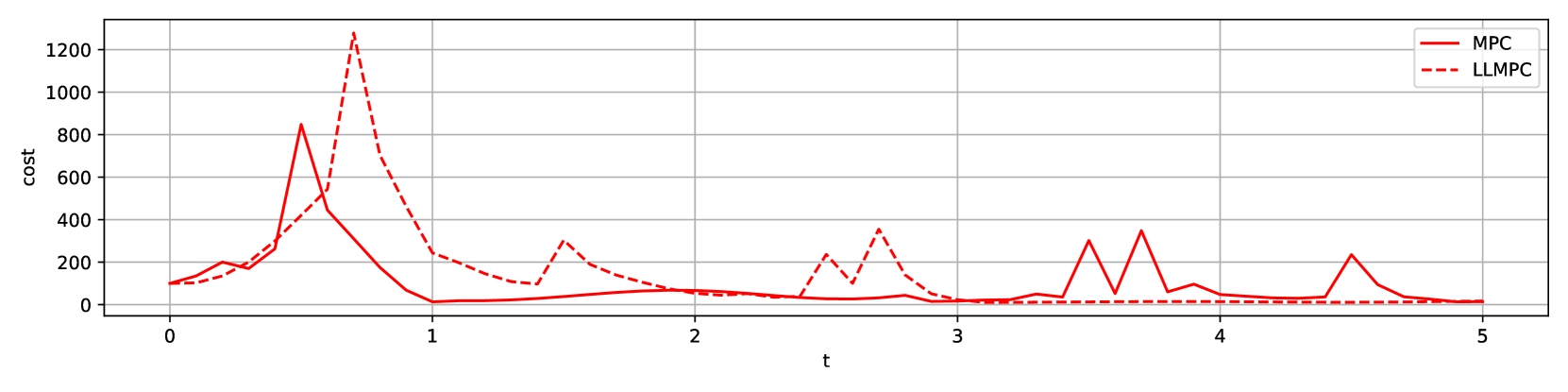
🖼️ 关键图片
📊 实验亮点
实验结果表明,LLMPC在多个规划基准测试中优于少量样本提示方法。具体而言,在某些任务上,LLMPC的性能提升幅度超过了10%。这表明,通过将LLM的规划能力与MPC框架相结合,可以显著提升规划任务的性能。具体的性能数据和对比基线在论文中进行了详细的展示。
🎯 应用场景
LLMPC具有广泛的应用前景,例如机器人导航、游戏AI、自动驾驶等。它可以应用于任何需要进行规划和决策的场景,尤其是在环境复杂、模型不确定或任务目标多样的场景下。通过利用LLM的强大推理和规划能力,LLMPC可以实现更智能、更灵活的规划和决策。
📄 摘要(原文)
Recent advancements in prompting techniques for Large Language Models (LLMs) have improved their reasoning, planning, and action abilities. This paper examines these prompting techniques through the lens of model predictive control (MPC). We show that LLMs act as implicit planning cost function minimizers when planning prompts are used. We propose a unified MPC framework for planning with LLMs and demonstrate improved performance over few shot prompting on several planning benchmarks.