Probabilistic Mission Design for Neuro-Symbolic Unmanned Aircraft Systems
作者: Simon Kohaut, Benedict Flade, Daniel Ochs, Devendra Singh Dhami, Julian Eggert, Kristian Kersting
分类: cs.AI, cs.RO
发布日期: 2024-12-25 (更新: 2026-01-16)
备注: arXiv admin note: text overlap with arXiv:2406.03454
DOI: 10.1109/TITS.2025.3609835
💡 一句话要点
提出ProMis,一种神经符号方法,用于在法律框架下进行无人机任务的概率化设计。
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 无人机系统 神经符号方法 概率任务设计 高级空中交通 混合概率逻辑程序
📋 核心要点
- 现有无人机系统在复杂法律约束和不确定环境下导航能力不足,难以满足高级空中交通的需求。
- ProMis通过神经符号方法,将不确定数据和法律规则相结合,实现无人机任务的概率化设计和风险评估。
- 实验表明,ProMis能够有效集成大型语言模型和视觉模型,适用于多种高级空中交通场景,提升任务规划能力。
📝 摘要(中文)
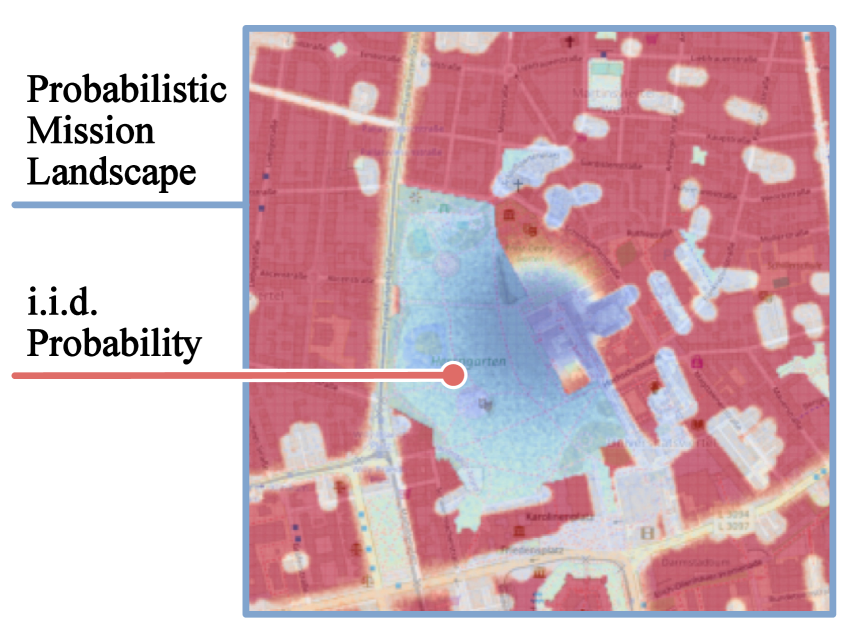
高级空中交通(AAM)是一个新兴领域,需要精确且可信的法律概念和限制模型,以便导航无人机系统(UAS)。此外,任何AAM的实施都需要稳健地应对固有动态和不确定的人工居住空间所带来的挑战。然而,超出视线范围(BVLOS)的UAS应用前景广阔,有望显著提升当今的物流和应急响应能力。因此,我们提出概率任务设计(ProMis),这是一种新颖的神经符号方法,用于在法律框架内导航UAS。ProMis是一个可解释且适应性强的系统架构,它将不确定的地理空间数据和嘈杂的感知与声明式的混合概率逻辑程序(HPLP)连接起来,以推理代理的状态空间及其合法性。为了在考虑法律限制和不确定性的情况下为规划提供信息,ProMis产生概率任务景观(PML)。这些标量场量化了HPLP在代理状态空间中得到满足的置信度。在扩展先前关于ProMis的推理能力和计算特性的工作的基础上,我们展示了它与强大的机器学习模型(如大型语言模型(LLM)和基于Transformer的视觉模型)的集成。因此,我们的实验支持ProMis与多模态输入数据的应用,以及我们的方法如何应用于许多AAM场景。
🔬 方法详解
问题定义:论文旨在解决无人机在复杂法律框架和不确定环境中安全可靠导航的问题。现有方法难以同时处理法律约束的精确性和环境感知的模糊性,导致任务规划的可靠性不足。尤其是在超出视线范围(BVLOS)的应用中,这种问题更加突出。
核心思路:ProMis的核心思路是将神经方法和符号推理相结合,利用神经模型处理感知数据中的不确定性,并使用混合概率逻辑程序(HPLP)进行法律规则的推理。通过这种方式,ProMis能够同时考虑环境的不确定性和法律的约束性,从而生成更安全可靠的任务规划。
技术框架:ProMis的整体架构包含以下几个主要模块:1) 感知模块:利用Transformer等模型处理多模态输入数据,如视觉信息和地理空间数据。2) 知识表示模块:使用HPLP对法律规则和无人机状态进行建模。3) 推理模块:基于HPLP进行概率推理,评估无人机在不同状态下的合法性。4) 任务规划模块:根据推理结果生成概率任务景观(PML),指导无人机进行任务规划。
关键创新:ProMis的关键创新在于将神经模型和符号推理有机结合,实现了一种可解释、可适应的无人机任务设计方法。与传统的基于规则的系统相比,ProMis能够处理感知数据中的不确定性;与纯粹的机器学习方法相比,ProMis具有更强的可解释性和法律约束的保证。
关键设计:HPLP的设计是ProMis的关键。HPLP允许将概率信息和逻辑规则结合在一起,从而能够对无人机状态的合法性进行概率化评估。此外,概率任务景观(PML)的设计也至关重要,它将HPLP的推理结果转化为一个标量场,用于指导无人机进行任务规划。
🖼️ 关键图片

📊 实验亮点
论文通过实验验证了ProMis在多模态输入数据下的应用能力,并展示了其在多种AAM场景中的有效性。实验结果表明,ProMis能够有效地集成大型语言模型和视觉模型,并生成符合法律约束的任务规划。虽然论文中没有给出具体的性能数据和对比基线,但其展示了ProMis在实际应用中的潜力。
🎯 应用场景
ProMis可广泛应用于高级空中交通(AAM)领域,例如物流配送、应急响应、环境监测等。通过在法律框架下进行概率化任务设计,ProMis能够提高无人机任务的安全性、可靠性和合规性,促进无人机技术的商业化应用和规模化部署。未来,ProMis有望成为无人机交通管理系统的重要组成部分。
📄 摘要(原文)
Advanced Air Mobility (AAM) is a growing field that demands accurate and trustworthy models of legal concepts and restrictions for navigating Unmanned Aircraft Systems (UAS). In addition, any implementation of AAM needs to face the challenges posed by inherently dynamic and uncertain human-inhabited spaces robustly. Nevertheless, the employment of UAS beyond visual line of sight (BVLOS) is an endearing task that promises to significantly enhance today's logistics and emergency response capabilities. Hence, we propose Probabilistic Mission Design (ProMis), a novel neuro-symbolic approach to navigating UAS within legal frameworks. ProMis is an interpretable and adaptable system architecture that links uncertain geospatial data and noisy perception with declarative, Hybrid Probabilistic Logic Programs (HPLP) to reason over the agent's state space and its legality. To inform planning with legal restrictions and uncertainty in mind, ProMis yields Probabilistic Mission Landscapes (PML). These scalar fields quantify the belief that the HPLP is satisfied across the agent's state space. Extending prior work on ProMis' reasoning capabilities and computational characteristics, we show its integration with potent machine learning models such as Large Language Models (LLM) and Transformer-based vision models. Hence, our experiments underpin the application of ProMis with multi-modal input data and how our method applies to many AAM scenarios.