Cooperative Cruising: Reinforcement Learning-Based Time-Headway Control for Increased Traffic Efficiency
作者: Yaron Veksler, Sharon Hornstein, Han Wang, Maria Laura Delle Monache, Daniel Urieli
分类: cs.MA, cs.AI, cs.LG, eess.SY
发布日期: 2024-12-03 (更新: 2025-02-02)
💡 一句话要点
提出基于强化学习的车头时距控制系统,提升多车道高速公路交通效率
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture)
关键词: 强化学习 车头时距控制 交通效率 自动驾驶 车路协同
📋 核心要点
- 现有研究难以在真实多车道高速公路场景中提升交通效率,且通常假设当前车辆不具备的连接性、感知和控制能力。
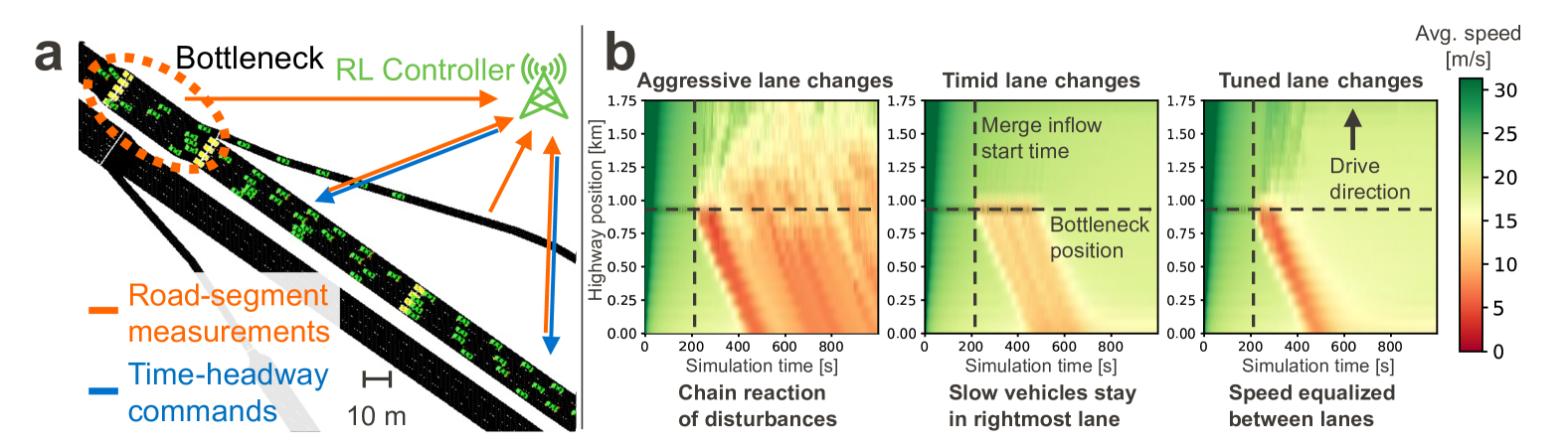
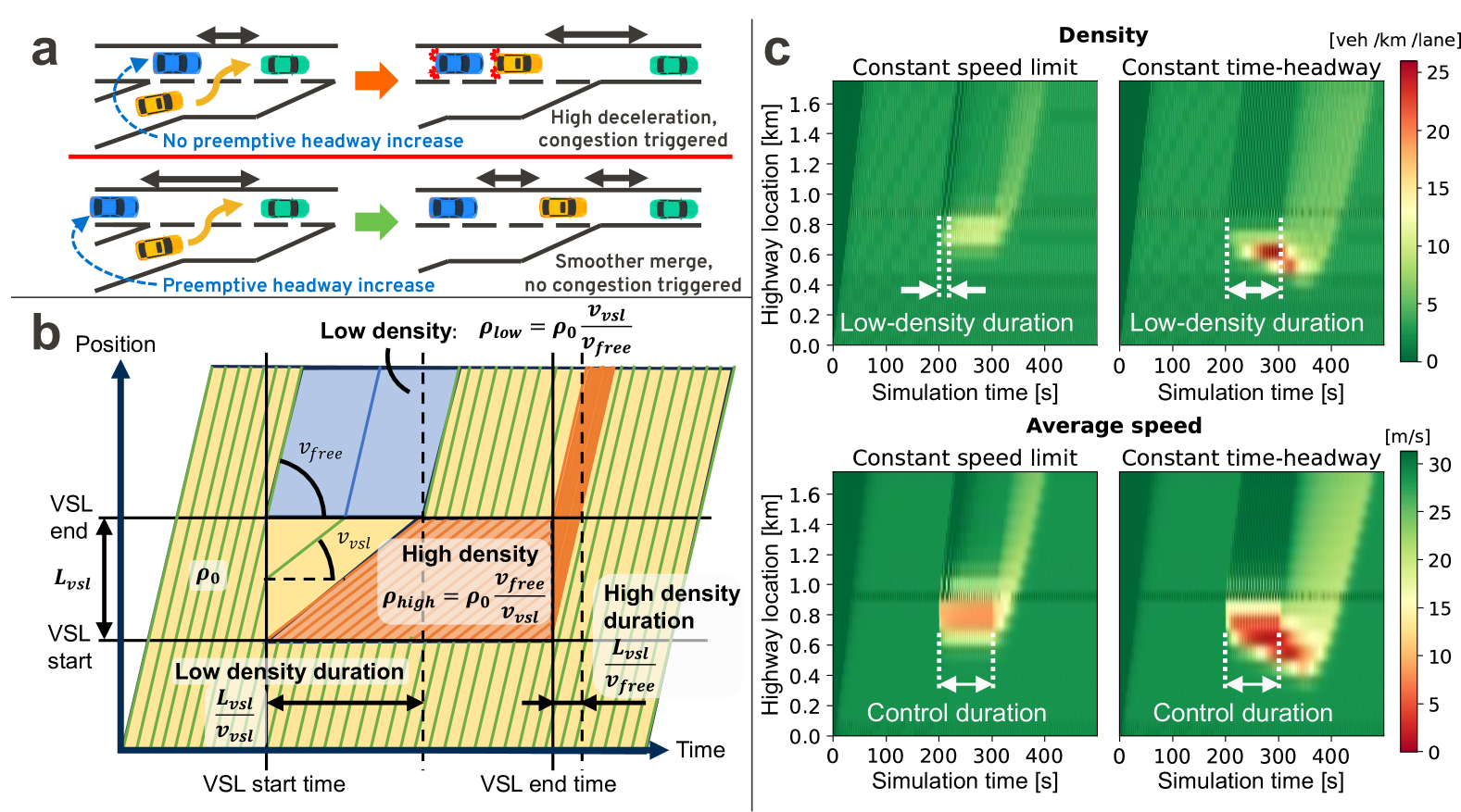
- 该论文提出基于强化学习的控制器,动态地向瓶颈附近的自动驾驶车辆传递车头时距,从而优化交通流。
- 该系统集成了现有交通估计技术、低带宽车路协同连接和安全认证的ACC系统,具有潜在的实用性和可扩展性。
📝 摘要(中文)
本文提出了一种新颖的AI系统,旨在提高高速公路交通效率,尤其是在现实的多车道场景中,且仅依赖现有车辆的连接性、感知和控制能力。该系统利用强化学习控制器,根据实时交通状况动态地向瓶颈附近的自动驾驶车辆传递期望的车头时距。自适应巡航控制(ACC)系统随后使用这些期望的车头时距来调整其跟随距离。通过(i)集成现有的交通估计技术和低带宽的车路协同连接,(ii)利用安全认证的ACC系统,以及(iii)针对可以在不同地点独立解决的局部瓶颈挑战,本文提出了一种潜在的实用、安全和可扩展的系统,可以对众多道路使用者产生积极影响。
🔬 方法详解
问题定义:论文旨在解决现实多车道高速公路场景下,现有方法无法有效提升交通效率的问题。现有方法通常依赖于当前车辆不具备的高级连接性、感知和控制能力,或者无法处理局部交通瓶颈。因此,需要一种更实用、安全且可扩展的系统,能够在现有车辆技术的基础上优化交通流。
核心思路:论文的核心思路是利用强化学习来控制自动驾驶车辆的车头时距,从而优化交通流。通过动态调整车辆之间的距离,可以减少交通拥堵,提高整体交通效率。这种方法不需要车辆具备高级的感知和通信能力,只需要现有的ACC系统和低带宽的车路协同连接。
技术框架:该系统的整体架构包括以下几个主要模块:1) 交通状态估计模块,用于实时监测交通状况;2) 强化学习控制器,根据交通状况计算出期望的车头时距;3) 车路协同通信模块,将期望的车头时距传递给自动驾驶车辆;4) 自适应巡航控制(ACC)系统,根据期望的车头时距调整车辆的跟随距离。整个流程是闭环的,交通状态估计模块的输出会影响强化学习控制器的决策,从而影响车辆的行驶行为。
关键创新:该论文最重要的技术创新点在于将强化学习应用于车头时距控制,并将其与现有的交通估计技术、低带宽车路协同连接和安全认证的ACC系统相结合。与现有方法相比,该方法不需要车辆具备高级的感知和通信能力,更具有实用性和可扩展性。此外,该方法针对局部交通瓶颈进行优化,可以独立部署在不同的地点,降低了部署成本和复杂性。
关键设计:强化学习控制器使用深度Q网络(DQN)进行训练。状态空间包括车辆的速度、位置、车头时距以及周围车辆的交通状况。动作空间包括增加、减少或保持当前车头时距。奖励函数的设计旨在鼓励车辆保持安全距离,同时提高交通效率。具体来说,奖励函数包括以下几个部分:1) 安全奖励,用于惩罚车辆之间的碰撞;2) 效率奖励,用于鼓励车辆以较高的速度行驶;3) 舒适性奖励,用于惩罚车辆的急加速和急减速。此外,论文还使用了经验回放和目标网络等技术来提高DQN的训练效果。
🖼️ 关键图片
📊 实验亮点
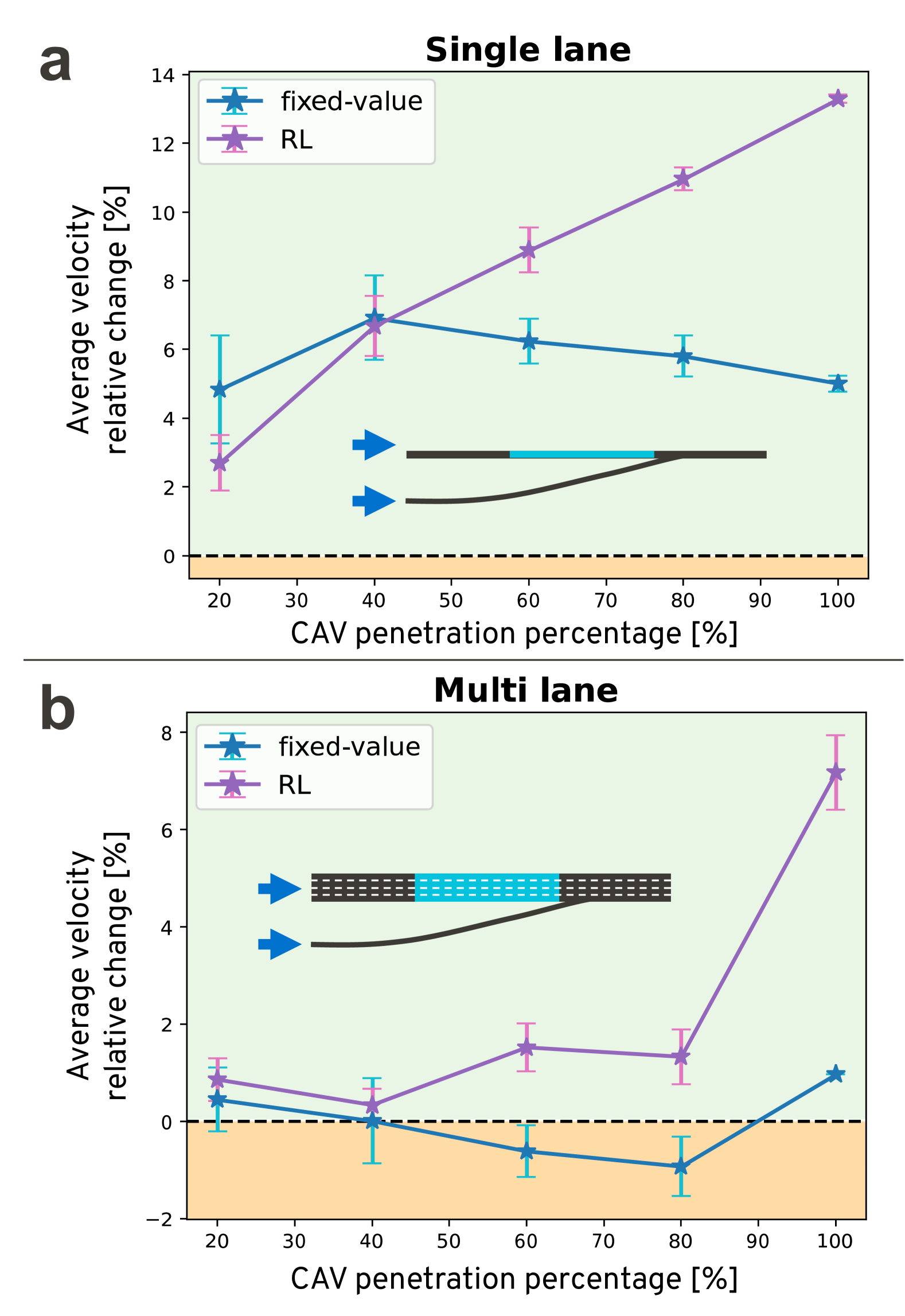
论文提出的系统在模拟的多车道高速公路场景中进行了评估,结果表明,与人类驾驶行为相比,该系统能够显著提高交通效率。具体来说,该系统能够减少交通拥堵,提高平均车速,并降低车辆的燃油消耗。虽然论文中没有给出具体的性能数据,但强调了该系统在现实场景中的可行性和有效性。
🎯 应用场景
该研究成果可应用于智能交通系统,通过优化自动驾驶车辆的车头时距,缓解城市交通拥堵,提高道路通行效率。该系统易于部署,只需利用现有车辆的ACC系统和低带宽车路协同连接,无需大规模改造现有交通基础设施。未来,该技术有望推广至更多城市和高速公路,为公众提供更高效、更安全的出行体验。
📄 摘要(原文)
The proliferation of connected automated vehicles represents an unprecedented opportunity for improving driving efficiency and alleviating traffic congestion. However, existing research fails to address realistic multi-lane highway scenarios without assuming connectivity, perception, and control capabilities that are typically unavailable in current vehicles. This paper proposes a novel AI system that is the first to improve highway traffic efficiency compared with human-like traffic in realistic, simulated multi-lane scenarios, while relying on existing connectivity, perception, and control capabilities. At the core of our approach is a reinforcement learning based controller that dynamically communicates time-headways to automated vehicles near bottlenecks based on real-time traffic conditions. These desired time-headways are then used by adaptive cruise control (ACC) systems to adjust their following distance. By (i) integrating existing traffic estimation technology and low-bandwidth vehicle-to-infrastructure connectivity, (ii) leveraging safety-certified ACC systems, and (iii) targeting localized bottleneck challenges that can be addressed independently in different locations, we propose a potentially practical, safe, and scalable system that can positively impact numerous road users.