Aligning LLM+PDDL Symbolic Plans with Human Objective Specifications through Evolutionary Algorithm Guidance
作者: Owen Burns, Dana Hughes, Katia Sycara
分类: cs.AI, cs.NE
发布日期: 2024-11-30 (更新: 2025-10-09)
备注: 7 pages, 5 figures
期刊: 2025 IEEE 21st International Conference on Automation Science and Engineering (CASE), Los Angeles, CA, USA, 2025, pp. 1584-1590
DOI: 10.1109/CASE58245.2025.11163939
🔗 代码/项目: GITHUB
💡 一句话要点
提出基于进化算法引导的LLM+PDDL方法,提升符号规划与人类目标规范的对齐
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 符号规划 大型语言模型 进化算法 自然语言处理 自动规划
📋 核心要点
- 符号规划语言PDDL需要专业知识,限制了非专业人士的使用,LLM+PDDL结合可以降低使用门槛,但LLM的翻译结果可能不精确。
- 论文提出使用进化算法生成一系列PDDL目标约束,并使用LSTM验证模型评估生成的计划是否符合自然语言规范。
- 在海军灾难恢复任务中的实验表明,该进化方法能够提高生成计划与自然语言规范的符合程度,优于仅使用LLM翻译的方法。
📝 摘要(中文)
本文提出了一种利用进化算法引导LLM+PDDL(大型语言模型+符号规划语言PDDL)进行自动规划的方法,旨在解决非专业人士在使用符号规划工具时面临的难题。该方法首先使用LLM将自然语言目标规范翻译成PDDL目标约束,然后通过进化算法生成一组与初始翻译略有不同的符号目标规范。接着,利用训练好的基于LSTM的验证模型评估种群中每个诱导计划是否符合自然语言规范。在假想的海军灾难恢复任务中的实验结果表明,与仅使用LLM翻译生成的计划相比,该进化方法能够提高生成计划与自然语言规范的符合程度。代码已开源。
🔬 方法详解
问题定义:论文旨在解决非专业人士难以使用符号规划语言PDDL进行自动规划的问题。现有方法依赖于人工编写精确的PDDL领域、问题和目标描述,这需要专业的规划语言知识。LLM+PDDL方法尝试通过大型语言模型将自然语言描述转换为PDDL,但LLM的翻译结果往往不够精确,导致生成的计划不符合人类的意图。
核心思路:论文的核心思路是利用进化算法对LLM生成的初始PDDL目标约束进行优化,生成一组略有不同的候选目标约束。通过评估这些候选约束生成的计划与自然语言规范的符合程度,选择最符合人类意图的约束,从而提高计划的质量。这种方法避免了直接验证PDDL约束的困难,转而评估计划的符合程度。
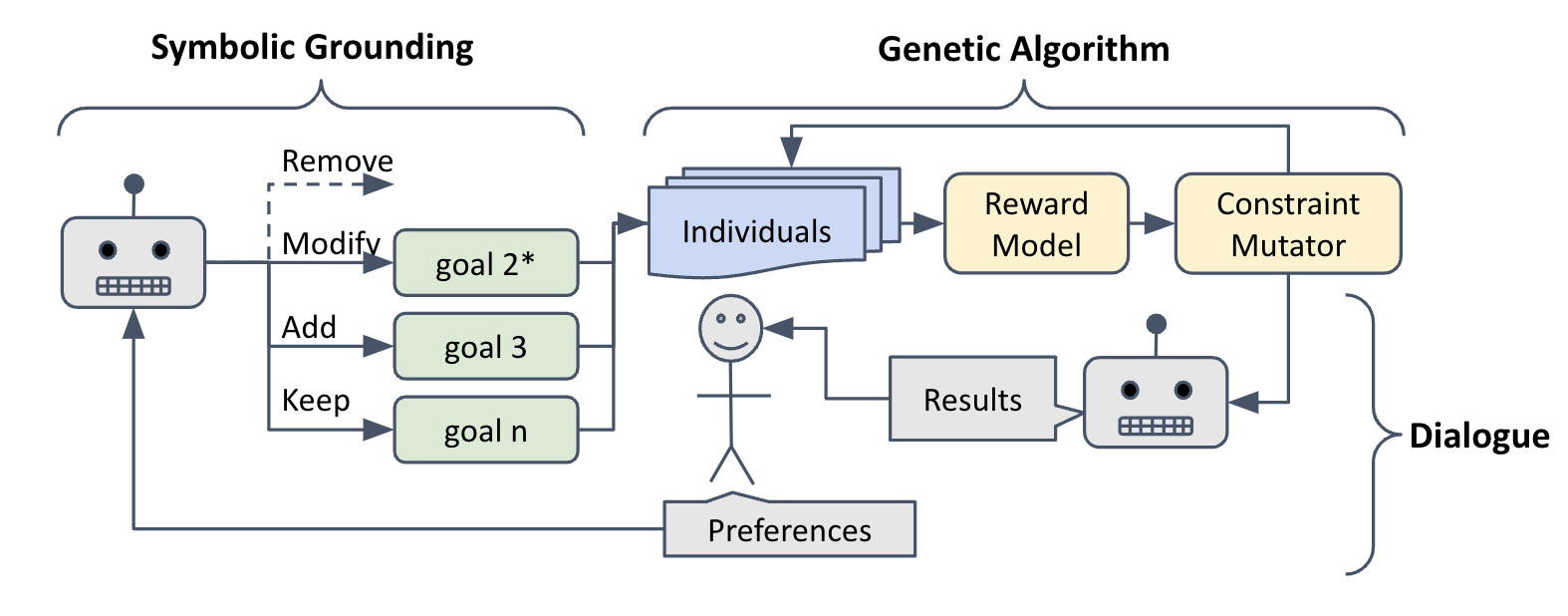
技术框架:整体流程如下:1) 使用LLM将自然语言目标规范翻译成初始的PDDL目标约束。2) 使用进化算法,以初始PDDL目标约束为基础,生成一个包含多个略有不同的PDDL目标约束的种群。3) 对于种群中的每个PDDL目标约束,使用符号规划器生成相应的计划。4) 使用训练好的基于LSTM的验证模型,评估每个计划与自然语言规范的符合程度。5) 根据评估结果,更新进化算法的种群,重复步骤2-4,直到找到符合要求的计划。
关键创新:最重要的技术创新点在于使用进化算法来优化LLM生成的PDDL目标约束。与直接依赖LLM的翻译结果相比,该方法能够探索更广阔的PDDL目标约束空间,找到更符合人类意图的约束。此外,使用LSTM验证模型评估计划的符合程度,避免了直接验证PDDL约束的困难。
关键设计:进化算法的关键设计包括:种群大小、变异算子、选择策略等。LSTM验证模型的关键设计包括:网络结构、训练数据、损失函数等。论文中提到使用LSTM进行验证,但没有详细描述LSTM的具体结构和参数设置。进化算法的具体参数设置也未知。
🖼️ 关键图片

📊 实验亮点
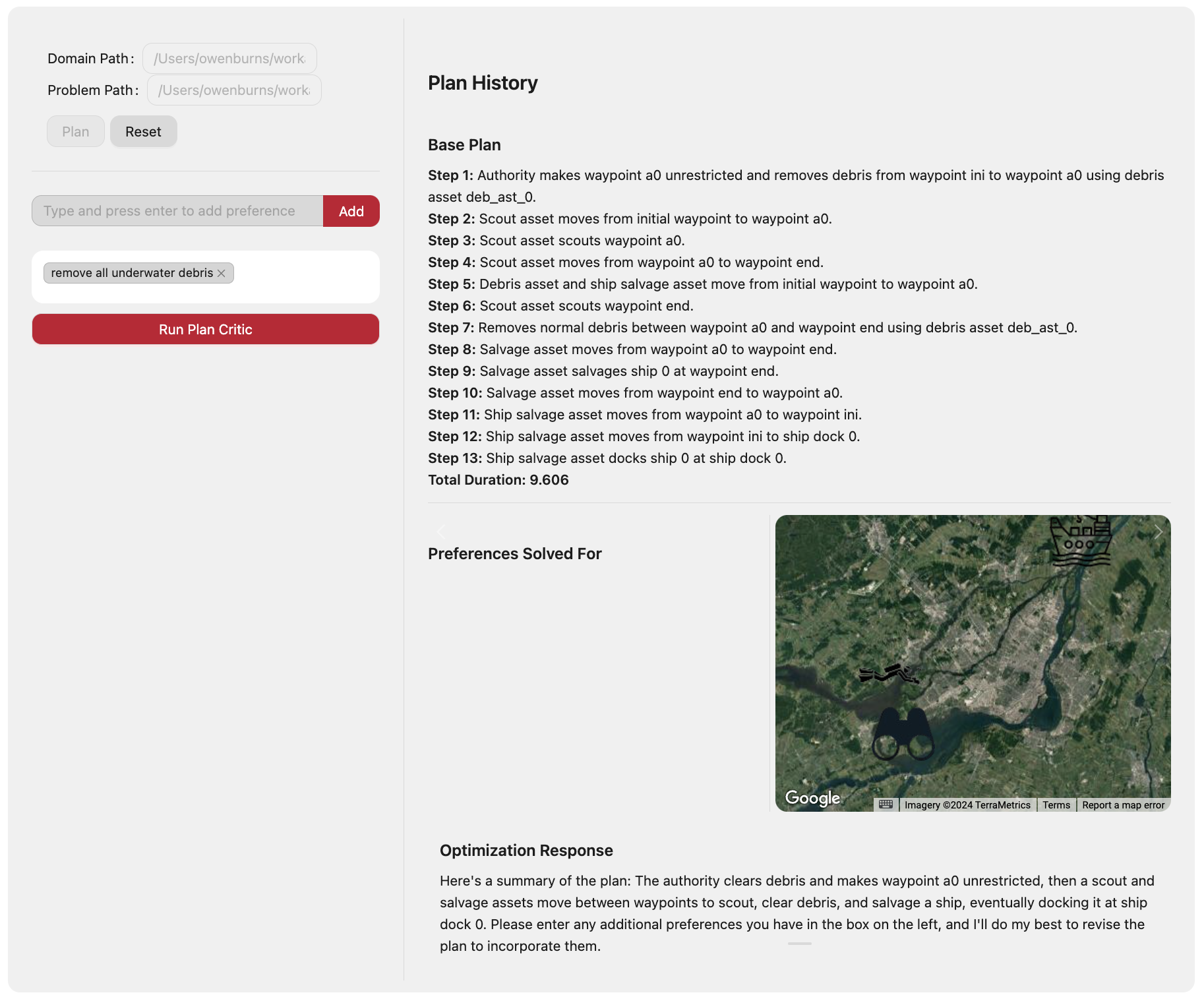
实验结果表明,与仅使用LLM翻译生成的计划相比,该进化方法能够显著提高生成计划与自然语言规范的符合程度。具体提升幅度未知,论文中没有给出具体的性能数据。该方法在海军灾难恢复任务中取得了良好的效果,验证了其在实际应用中的潜力。
🎯 应用场景
该研究成果可应用于各种需要自动规划的领域,例如机器人任务规划、智能家居控制、供应链管理等。通过结合LLM和符号规划,可以降低自动规划的使用门槛,使非专业人士也能方便地利用自动规划技术解决实际问题。未来,该方法可以进一步扩展到更复杂的规划场景,并与其他AI技术相结合,实现更智能化的自动化。
📄 摘要(原文)
Automated planning using a symbolic planning language, such as PDDL, is a general approach to producing optimal plans to achieve a stated goal. However, creating suitable machine understandable descriptions of the planning domain, problem, and goal requires expertise in the planning language, limiting the utility of these tools for non-expert humans. Recent efforts have explored utilizing a symbolic planner in conjunction with a large language model to generate plans from natural language descriptions given by a non-expert human (LLM+PDDL). Our approach performs initial translation of goal specifications to a set of PDDL goal constraints using an LLM; such translations often result in imprecise symbolic specifications, which are difficult to validate directly. We account for this using an evolutionary approach to generate a population of symbolic goal specifications with slight differences from the initial translation, and utilize a trained LSTM-based validation model to assess whether each induced plan in the population adheres to the natural language specifications. We evaluate our approach on a collection of prototypical specifications in a notional naval disaster recovery task, and demonstrate that our evolutionary approach improve adherence of generated plans to natural language specifications when compared to plans generated using only LLM translations. The code for our method can be found at https://github.com/owenonline/PlanCritic.