Effect of Adaptive Communication Support on LLM-powered Human-Robot Collaboration
作者: Shipeng Liu, FNU Shrutika, Boshen Zhang, Zhehui Huang, Gaurav Sukhatme, Feifei Qian
分类: cs.HC, cs.AI, cs.RO
发布日期: 2024-11-26 (更新: 2025-02-11)
备注: 13 pages, 7 figures
💡 一句话要点
提出HRT-ML框架,通过自适应通信支持提升LLM驱动的人机协作性能
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 人机协作 大型语言模型 自适应通信 机器人反馈 Overcooked环境
📋 核心要点
- 传统人机协作依赖预设通信方案,难以适应复杂任务中人类需求的变化。
- HRT-ML框架利用LLM的强大通信能力,通过协调器和管理器模块自适应调整反馈频率和内容。
- 实验表明,适当频率的主动反馈能提升复杂任务中的人机协作性能,但过高频率可能适得其反。
📝 摘要(中文)
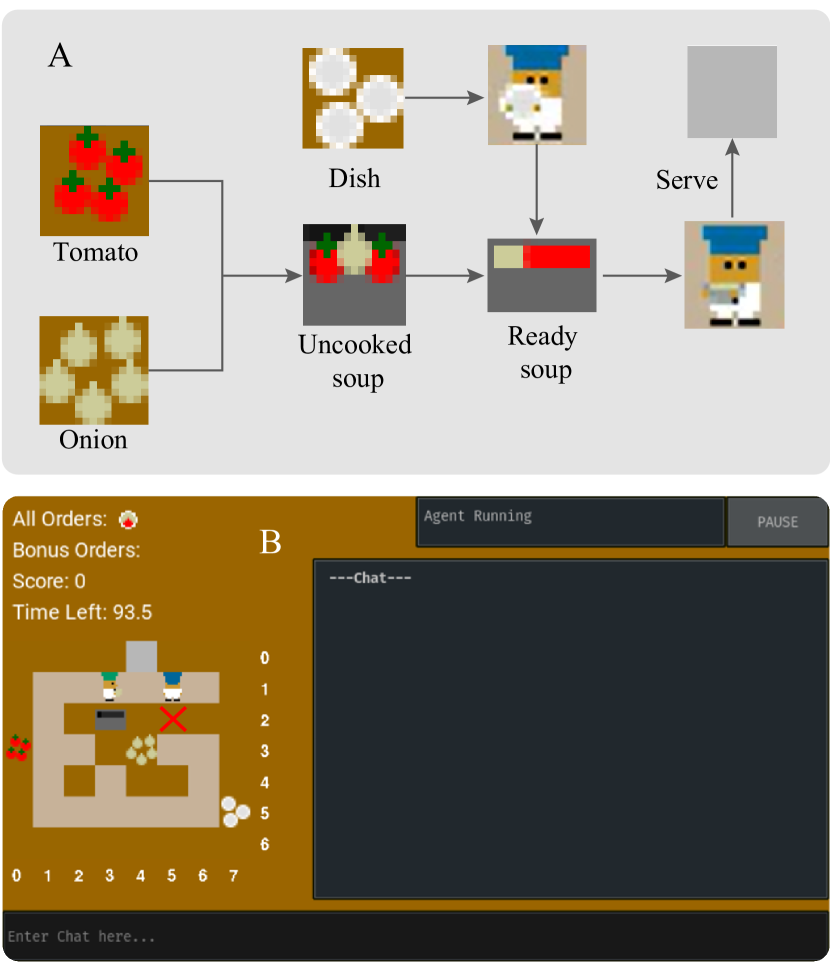
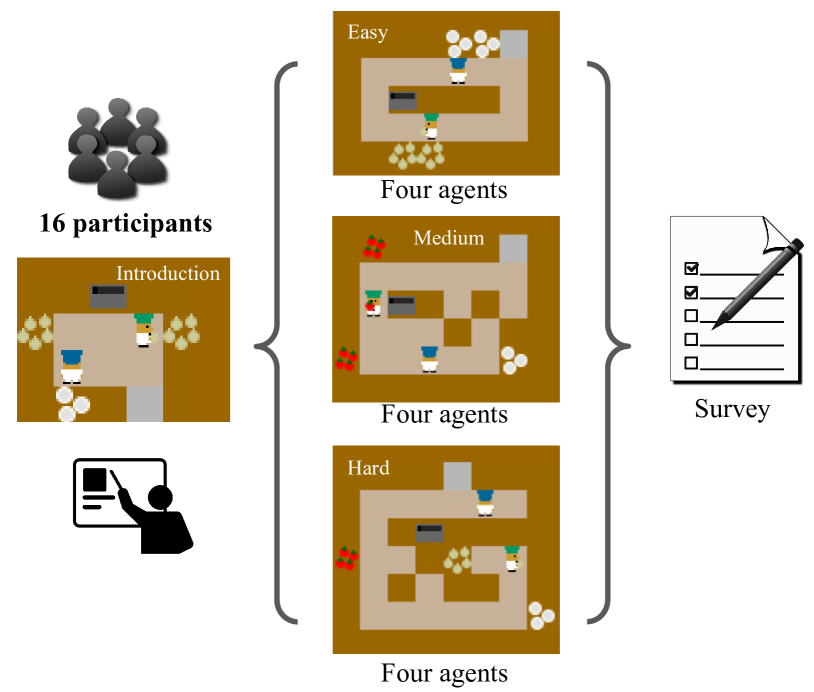
为了使机器人能够根据人类需求、任务要求和复杂度调整其角色和支持水平,本文提出了一种基于大型语言模型(LLM)的人机协作框架HRT-ML,该框架通过调整基于语言的反馈的频率和内容来增强人机交互。HRT-ML框架包括两个核心模块:用于提供高层、低频战略指导的协调器,以及用于提供子任务特定、高频指令的管理器,从而实现与人类队友的被动和主动交互。为了评估语言反馈在协作场景中的影响,我们在一个增强的Overcooked环境中进行了实验,实验设置了不同级别的任务复杂度(简单、中等、困难)和反馈频率(非活跃、被动、主动、超活跃)。结果表明,随着任务复杂度相对于人类能力增加,人类队友更倾向于能够提供频繁、主动支持的机器人。然而,当任务复杂度超过LLM的能力时,来自超活跃机器人的嘈杂和不准确的反馈反而会阻碍团队表现,因为它需要人类队友付出更多努力来解释和响应大量通信,而性能回报有限。研究结果为机器人动态调整其通信水平和频率以与人类无缝协作并实现改进的团队表现提供了一般原则。
🔬 方法详解
问题定义:现有的人机协作系统通常采用预先设定的机器人通信方案,这种静态的通信方式无法根据人类队友的能力、任务的复杂程度以及实时需求进行动态调整。尤其是在复杂任务中,人类队友可能需要不同频率和内容的指导,而固定的通信策略难以满足这些需求,导致协作效率降低。此外,过度或不准确的通信反而会干扰人类队友,降低整体团队表现。
核心思路:本文的核心思路是利用大型语言模型(LLM)强大的语言理解和生成能力,构建一个能够自适应调整通信频率和内容的机器人协作框架。该框架通过分析任务状态和人类队友的行为,动态地选择合适的通信策略,从而提供更有效和个性化的支持。这种自适应通信的目标是最大化团队协作效率,同时避免过度或不准确的通信对人类队友造成干扰。
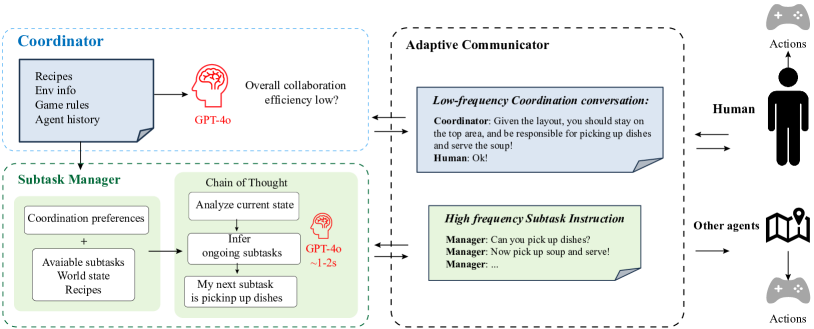
技术框架:HRT-ML框架包含两个核心模块:协调器(Coordinator)和管理器(Manager)。协调器负责提供高层次、低频率的战略指导,例如任务目标、整体规划等。管理器则负责提供子任务特定、高频率的指令,例如具体的操作步骤、注意事项等。这两个模块协同工作,共同管理人机交互过程。框架还包括一个环境感知模块,用于获取任务状态和人类队友的行为信息,并将其输入到LLM中进行分析和决策。LLM根据这些信息,动态地调整协调器和管理器的行为,从而实现自适应通信。
关键创新:HRT-ML框架的关键创新在于其自适应通信机制。与传统的固定通信策略不同,HRT-ML能够根据任务状态和人类队友的需求,动态地调整通信频率和内容。这种自适应性使得机器人能够提供更有效和个性化的支持,从而提高人机协作效率。此外,框架还采用了分层通信结构,将高层次的战略指导和低层次的指令分开管理,从而避免了信息过载和干扰。
关键设计:HRT-ML框架的关键设计包括LLM的选择和微调、环境感知模块的设计、以及协调器和管理器的行为策略。LLM的选择需要考虑其语言理解和生成能力、以及推理能力。环境感知模块需要能够准确地获取任务状态和人类队友的行为信息。协调器和管理器的行为策略需要能够根据LLM的决策,生成合适的通信内容和频率。具体的参数设置和损失函数等技术细节在论文中未详细说明,属于未知信息。
🖼️ 关键图片
📊 实验亮点
实验结果表明,在增强的Overcooked环境中,随着任务复杂度的增加,人类队友更倾向于能够提供频繁、主动支持的机器人。然而,当任务复杂度超过LLM的能力时,来自超活跃机器人的嘈杂和不准确的反馈反而会阻碍团队表现。该研究揭示了人机协作中通信频率和内容的重要性,为机器人自适应通信策略的设计提供了重要指导。
🎯 应用场景
该研究成果可应用于各种人机协作场景,例如:智能制造、医疗手术、灾难救援等。通过自适应通信,机器人能够更好地理解人类需求,提供更有效的支持,从而提高工作效率和安全性。未来,该技术有望进一步发展,实现更自然、流畅的人机交互,促进人机协同的广泛应用。
📄 摘要(原文)
Effective human-robot collaboration requires robot to adopt their roles and levels of support based on human needs, task requirements, and complexity. Traditional human-robot teaming often relies on a pre-determined robot communication scheme, restricting teamwork adaptability in complex tasks. Leveraging strong communication capabilities of Large Language Models (LLMs), we propose a Human-Robot Teaming Framework with Multi-Modal Language feedback (HRT-ML), a framework designed to enhance human-robot interaction by adjusting the frequency and content of language-based feedback. HRT-ML framework includes two core modules: a Coordinator for high-level, low-frequency strategic guidance, and a Manager for subtask-specific, high-frequency instructions, enabling passive and active interactions with human teammates. To assess the impact of language feedback in collaborative scenarios, we conducted experiments in an enhanced Overcooked environment with varying levels of task complexity (easy, medium, hard) and feedback frequency (inactive, passive, active, superactive). Our results show that as task complexity increases relative to human capabilities, human teammates exhibited a stronger preference towards robotic agents that can offer frequent, proactive support. However, when task complexities exceed the LLM's capacity, noisy and inaccurate feedback from superactive robotic agents can instead hinder team performance, as it requires human teammates to increase their effort to interpret and respond to a large number of communications, with limited performance return. Our results offer a general principle for robotic agents to dynamically adjust their levels and frequencies of communications to work seamlessly with humans and achieve improved teaming performance.