MCCoder: Streamlining Motion Control with LLM-Assisted Code Generation and Rigorous Verification
作者: Yin Li, Liangwei Wang, Shiyuan Piao, Boo-Ho Yang, Ziyue Li, Wei Zeng, Fugee Tsung
分类: cs.AI
发布日期: 2024-10-19 (更新: 2025-07-02)
备注: IEEE CASE 2025 Best Student Paper Finalists
💡 一句话要点
MCCoder:利用LLM辅助代码生成和严格验证,简化运动控制
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 运动控制 代码生成 大型语言模型 检索增强生成 3D模拟 工厂自动化 MCEVAL数据集
📋 核心要点
- 工厂自动化中运动控制编程仍依赖手动,调试低效且存在安全隐患,现有AI辅助编程主要集中于PLC,忽略了高级语言和函数库。
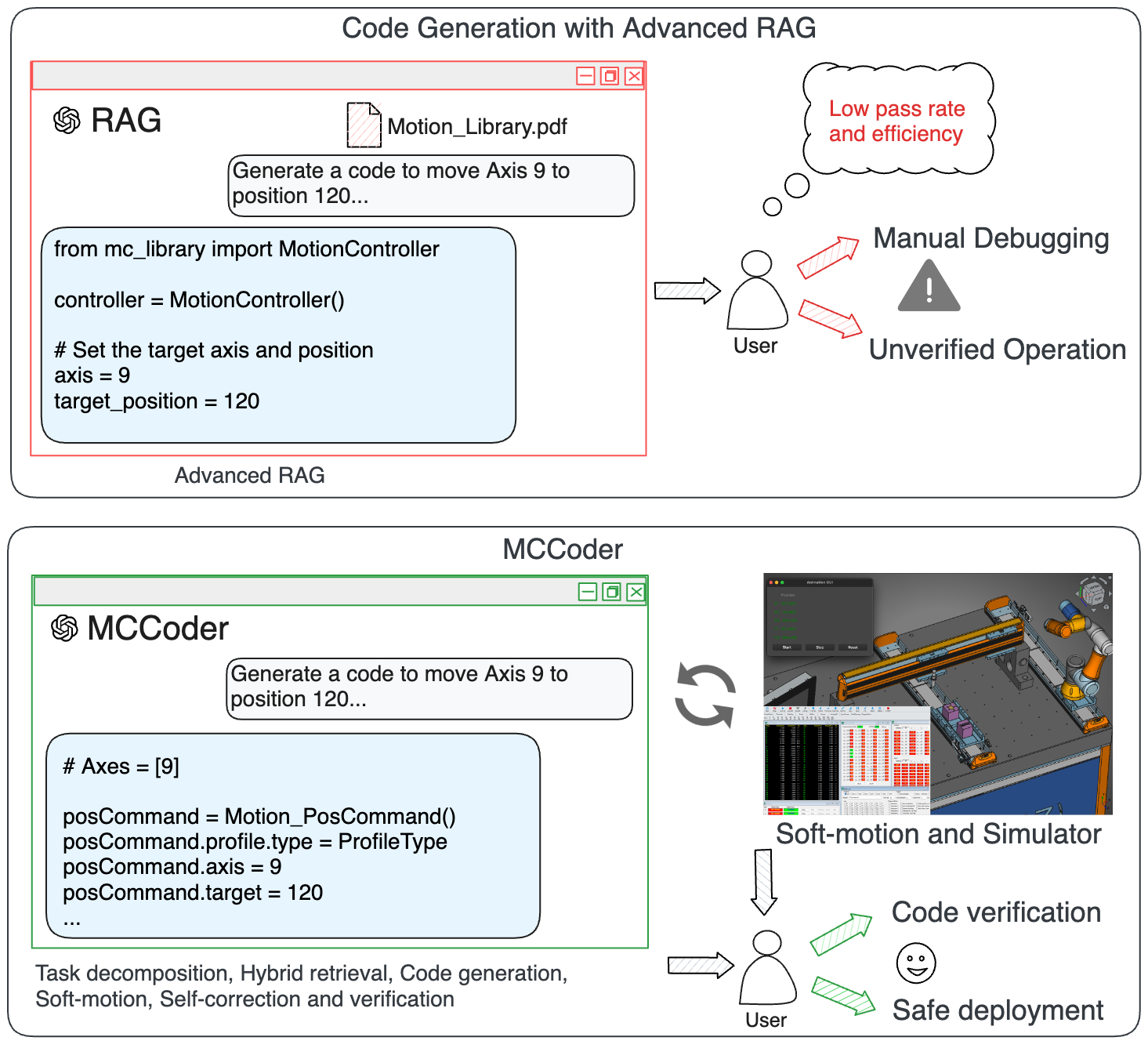
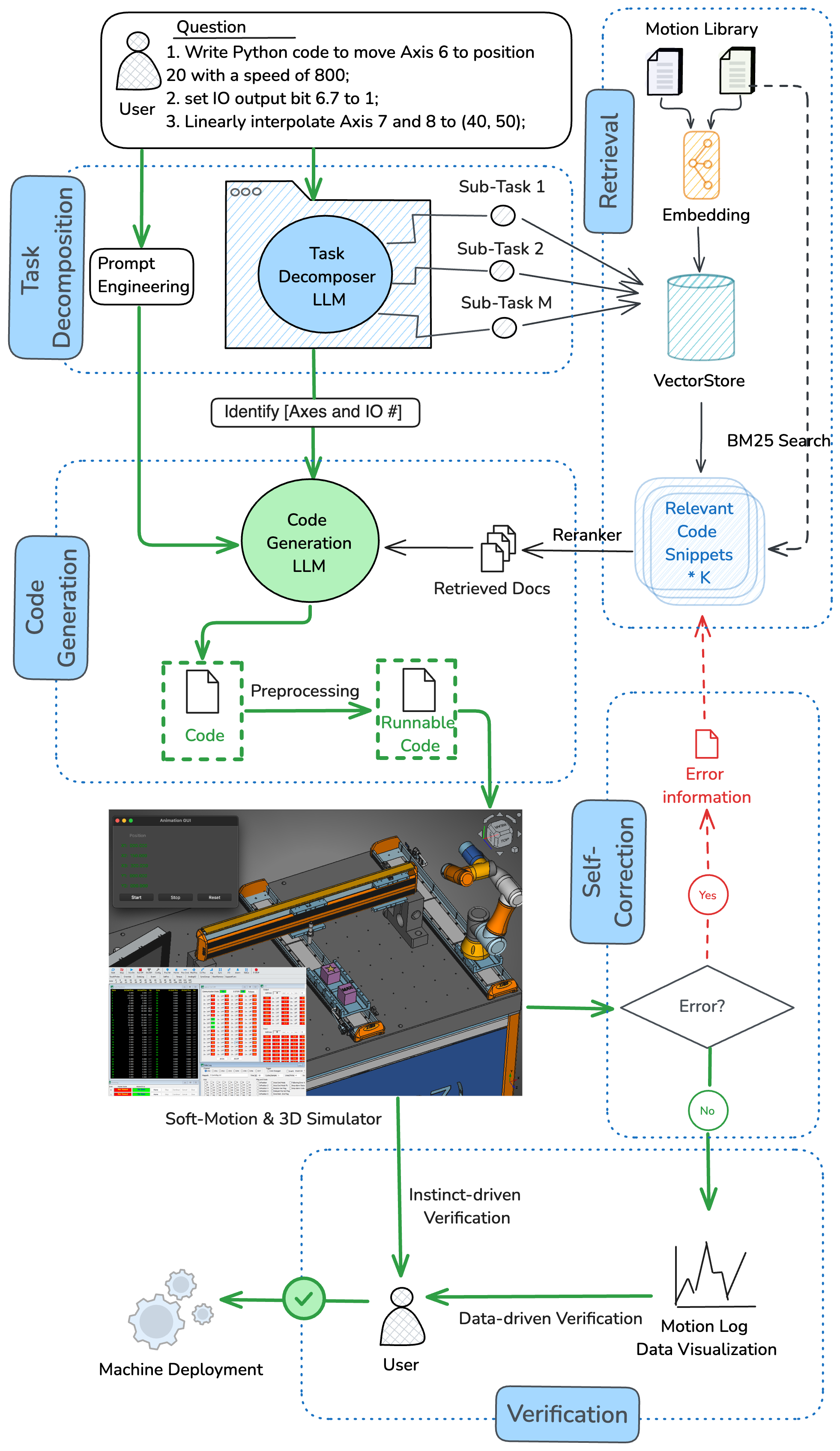
- MCCoder通过多任务分解、混合RAG和迭代自校正的结构化流程,利用运动库生成运动控制代码,并集成3D模拟器进行验证。
- 论文提出了MCEVAL数据集用于评估运动控制代码生成,实验表明MCCoder在总体性能和复杂任务上均优于基线模型。
📝 摘要(中文)
大型语言模型(LLMs)在代码生成方面展现出巨大潜力。然而,在工厂自动化领域,特别是运动控制方面,手动编程以及低效且不安全的调试实践仍然普遍存在。这源于机械和电气系统之间复杂的相互作用以及严格的安全要求。此外,目前大多数AI辅助的运动控制编程工作都集中在PLC上,很少关注高级语言和函数库。为了应对这些挑战,我们推出MCCoder,这是一个由LLM驱动的系统,专为生成运动控制代码而定制,并集成了软运动控制器。MCCoder通过结合多任务分解、混合检索增强生成(RAG)和迭代自校正的结构化工作流程来改进代码生成,并利用完善的运动库。此外,它还集成了3D模拟器,用于直观的运动验证和完整运动轨迹的日志,用于数据验证,从而显著提高准确性和安全性。在缺乏专门用于评估运动控制代码生成的基准数据集和指标的情况下,我们提出了MCEVAL,这是一个涵盖各种复杂程度的运动任务的数据集。实验表明,MCCoder优于使用高级RAG的基线模型,在MCEVAL数据集中实现了33.09%的总体性能提升,并在复杂任务上实现了131.77%的改进。
🔬 方法详解
问题定义:论文旨在解决工厂自动化领域运动控制编程中手动编程效率低、调试不安全以及现有AI辅助编程对高级语言支持不足的问题。现有方法主要依赖PLC编程,缺乏对高级语言和函数库的有效利用,导致开发周期长、维护困难,且难以保证安全性。
核心思路:论文的核心思路是利用大型语言模型(LLM)强大的代码生成能力,结合结构化的工作流程和验证机制,自动生成高质量、安全可靠的运动控制代码。通过多任务分解降低问题复杂度,利用混合RAG提升生成代码的准确性,并通过迭代自校正进一步优化代码质量。
技术框架:MCCoder的整体架构包含以下几个主要模块:1) 任务分解模块:将复杂的运动控制任务分解为多个子任务。2) 混合RAG模块:结合知识库检索和上下文学习,生成初始代码。3) 迭代自校正模块:通过模拟和验证,对生成的代码进行迭代优化。4) 3D模拟器:用于直观地验证运动轨迹和安全性。5) MCEVAL数据集:用于评估和比较不同模型的性能。
关键创新:MCCoder的关键创新在于:1) 提出了一个结构化的LLM驱动的运动控制代码生成流程,包括多任务分解、混合RAG和迭代自校正。2) 集成了3D模拟器,用于直观的运动验证和数据验证,从而提高安全性和可靠性。3) 构建了MCEVAL数据集,为运动控制代码生成提供了一个基准评估平台。
关键设计:混合RAG模块的关键设计在于结合了知识库检索和上下文学习。知识库包含了常用的运动控制函数和代码片段,通过检索可以快速生成初始代码。上下文学习则利用LLM的泛化能力,根据任务描述和约束条件,对初始代码进行调整和优化。迭代自校正模块的关键设计在于利用3D模拟器进行运动验证,并根据验证结果对代码进行迭代优化。具体的参数设置和损失函数等技术细节在论文中未详细说明,属于未知信息。
🖼️ 关键图片
📊 实验亮点
实验结果表明,MCCoder在MCEVAL数据集上优于使用高级RAG的基线模型,实现了33.09%的总体性能提升,并在复杂任务上实现了131.77%的显著改进。这些数据表明MCCoder在运动控制代码生成方面具有显著优势,尤其是在处理复杂任务时。
🎯 应用场景
MCCoder可应用于各种工厂自动化场景,例如机器人装配、物料搬运、数控机床等。通过自动生成运动控制代码,可以显著缩短开发周期、降低开发成本,并提高生产效率。此外,集成的3D模拟器可以有效提高安全性和可靠性,降低事故风险。未来,该技术有望推动工厂自动化向智能化、柔性化方向发展。
📄 摘要(原文)
Large Language Models (LLMs) have demonstrated significant potential in code generation. However, in the factory automation sector, particularly motion control, manual programming, alongside inefficient and unsafe debugging practices, remains prevalent. This stems from the complex interplay of mechanical and electrical systems and stringent safety requirements. Moreover, most current AI-assisted motion control programming efforts focus on PLCs, with little attention given to high-level languages and function libraries. To address these challenges, we introduce MCCoder, an LLM-powered system tailored for generating motion control code, integrated with a soft-motion controller. MCCoder improves code generation through a structured workflow that combines multitask decomposition, hybrid retrieval-augmented generation (RAG), and iterative self-correction, utilizing a well-established motion library. Additionally, it integrates a 3D simulator for intuitive motion validation and logs of full motion trajectories for data verification, significantly enhancing accuracy and safety. In the absence of benchmark datasets and metrics tailored for evaluating motion control code generation, we propose MCEVAL, a dataset spanning motion tasks of varying complexity. Experiments show that MCCoder outperforms baseline models using Advanced RAG, achieving an overall performance gain of 33.09% and a 131.77% improvement on complex tasks in the MCEVAL dataset.