Neural Circuit Architectural Priors for Quadruped Locomotion
作者: Nikhil X. Bhattasali, Venkatesh Pattabiraman, Lerrel Pinto, Grace W. Lindsay
分类: q-bio.NC, cs.AI, cs.LG, cs.NE, cs.RO
发布日期: 2024-10-09
💡 一句话要点
提出基于神经环路架构先验的四足机器人运动控制方法,提升数据效率和泛化性。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 四足机器人 运动控制 神经环路 架构先验 生物启发
📋 核心要点
- 现有四足机器人运动控制方法依赖大量数据和人工设计的奖励函数,泛化能力弱,难以适应真实环境。
- 受生物神经系统启发,论文提出一种基于神经环路架构先验的ANN架构,模拟哺乳动物的运动控制神经机制。
- 实验表明,该架构在数据效率、参数量和泛化能力方面优于传统MLP,并成功部署于真实机器人。
📝 摘要(中文)
基于学习的四足机器人运动控制方法通常采用全连接MLP等通用策略架构。由于此类架构缺乏归纳偏置,实践中通常需要引入奖励、训练课程、模仿数据或轨迹生成器等先验知识。在自然界中,动物天生就具有先验知识,即神经系统的架构,这种架构经过进化,赋予了它们天生的能力和高效的学习能力。例如,一匹马在出生后几个小时内就能行走,并且可以通过练习迅速提高。这种架构先验在人工智能的ANN架构中也很有用。本文探索了一种受生物学启发的ANN架构在四足机器人运动控制中的优势,该架构基于哺乳动物四肢和脊髓中的神经环路。我们的架构实现了良好的初始性能和与MLP相当的最终性能,同时使用更少的数据和数量级更少的参数。我们的架构还表现出更好的任务变体泛化能力,甚至可以在没有标准sim-to-real方法的情况下部署在物理机器人上。这项工作表明,神经环路可以为运动控制提供有价值的架构先验,并鼓励未来在其他感觉运动技能方面的工作。
🔬 方法详解
问题定义:现有基于学习的四足机器人运动控制方法,如使用全连接MLP,缺乏有效的归纳偏置,需要大量数据进行训练,并且泛化能力较差,难以适应真实世界的各种复杂环境和任务变化。人工设计的奖励函数也限制了策略的探索空间。
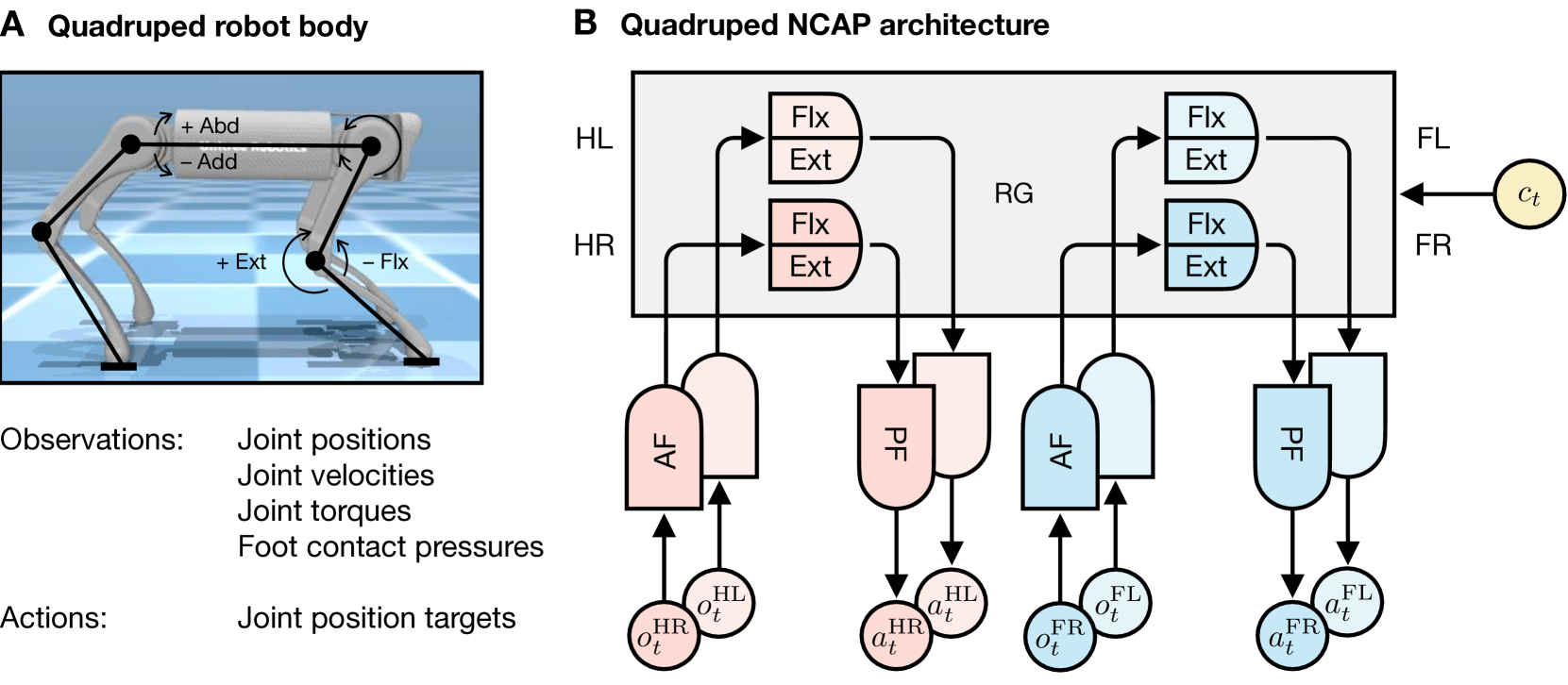
核心思路:借鉴生物神经系统的架构先验,特别是哺乳动物四肢和脊髓中的神经环路,设计一种具有生物学合理性的神经网络架构。这种架构能够提供更强的归纳偏置,从而提高数据效率、泛化能力和鲁棒性。
技术框架:该方法的核心是构建一个模拟生物神经环路的ANN架构。该架构包含多个模块,分别对应于生物神经系统中的不同功能单元,例如感受器、运动神经元和中间神经元。这些模块通过特定的连接模式相互连接,形成一个具有层次结构的控制系统。整体流程包括:1)接收来自环境的传感器信息;2)通过神经环路进行信息处理;3)生成控制信号驱动机器人运动。
关键创新:该方法的关键创新在于将生物神经环路的架构先验引入到ANN设计中。与传统的全连接MLP相比,该架构具有更强的归纳偏置,能够更好地捕捉运动控制的内在规律。这种架构先验使得模型能够更快地学习,并且具有更好的泛化能力。
关键设计:具体的网络结构设计包括:1)使用特定的连接模式来模拟神经环路中的兴奋性和抑制性连接;2)使用较少的参数来降低模型的复杂度,提高数据效率;3)设计特定的损失函数来鼓励模型学习生物学合理的运动模式。具体参数设置和网络结构细节在论文附录中有详细描述(未知)。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该方法在四足机器人运动控制任务中,使用的数据量比传统MLP减少了数个数量级,同时达到了相当甚至更好的性能。此外,该方法还表现出更强的泛化能力,能够适应不同的任务变体,并且可以直接部署在真实机器人上,无需额外的sim-to-real技术。
🎯 应用场景
该研究成果可应用于各种四足机器人的运动控制,尤其是在资源受限或需要快速适应新环境的场景下,例如搜救机器人、农业机器人和探索机器人。该方法还可以推广到其他感觉运动技能的学习,例如灵巧操作和双足行走,为开发更智能、更鲁棒的机器人系统提供新的思路。
📄 摘要(原文)
Learning-based approaches to quadruped locomotion commonly adopt generic policy architectures like fully connected MLPs. As such architectures contain few inductive biases, it is common in practice to incorporate priors in the form of rewards, training curricula, imitation data, or trajectory generators. In nature, animals are born with priors in the form of their nervous system's architecture, which has been shaped by evolution to confer innate ability and efficient learning. For instance, a horse can walk within hours of birth and can quickly improve with practice. Such architectural priors can also be useful in ANN architectures for AI. In this work, we explore the advantages of a biologically inspired ANN architecture for quadruped locomotion based on neural circuits in the limbs and spinal cord of mammals. Our architecture achieves good initial performance and comparable final performance to MLPs, while using less data and orders of magnitude fewer parameters. Our architecture also exhibits better generalization to task variations, even admitting deployment on a physical robot without standard sim-to-real methods. This work shows that neural circuits can provide valuable architectural priors for locomotion and encourages future work in other sensorimotor skills.