NSP: A Neuro-Symbolic Natural Language Navigational Planner
作者: William English, Dominic Simon, Sumit Jha, Rickard Ewetz
分类: cs.AI, cs.CL, cs.HC
发布日期: 2024-09-10 (更新: 2024-09-13)
备注: 10 pages, Preprint of paper accepted at 23rd International Conference on Machine Learning and Applications (ICMLA) 2024
💡 一句话要点
提出神经符号框架NSP以解决自然语言路径规划问题
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 自然语言处理 路径规划 神经符号方法 大型语言模型 机器人技术
📋 核心要点
- 现有路径规划方法在处理自然语言输入时存在解析困难,导致用户交互不够直观。
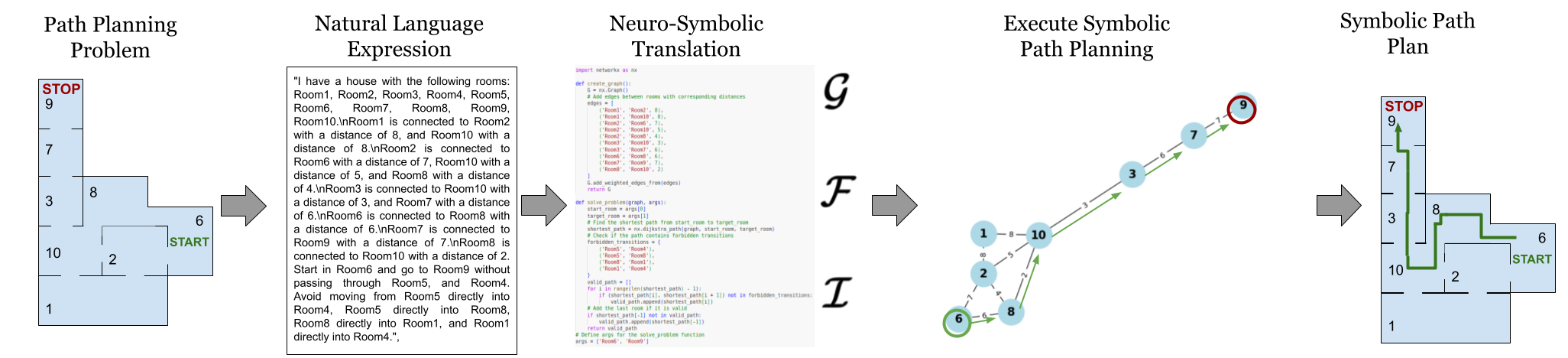
- NSP框架结合了神经网络和符号推理的优势,通过构建环境的符号表示来解决路径规划问题。
- 实验结果显示,NSP方法生成的有效路径比例高达90.1%,且路径长度显著优于现有神经方法。
📝 摘要(中文)
能够理解自由形式自然语言指令的路径规划器在自动化机器人应用中具有广泛前景。这些规划器简化了用户交互,并使复杂半自主系统的控制更加直观。现有的符号方法在正确性和效率上有保证,但难以解析自由形式的自然语言输入;而基于预训练大型语言模型的神经方法能够处理自然语言输入,但缺乏性能保证。本文提出了一种名为NSP的神经符号框架,利用大型语言模型的神经推理能力,构建环境的符号表示并执行符号路径规划算法。通过在环境表示上执行算法,获得路径规划问题的解决方案。该框架通过从符号执行环境到神经生成过程的反馈循环,自我纠正语法错误并满足执行时间约束。实验评估表明,NSP方法生成的有效路径达90.1%,且平均比最先进的神经方法短19-77%。
🔬 方法详解
问题定义:本文旨在解决如何从自然语言指令中进行有效的路径规划。现有方法在解析自由形式自然语言输入时存在显著不足,导致用户体验不佳。
核心思路:NSP框架的核心思想是结合神经网络的自然语言处理能力与符号推理的准确性,通过构建符号环境表示来实现路径规划。这样设计的目的是为了在保证路径规划正确性的同时,能够灵活处理自然语言输入。
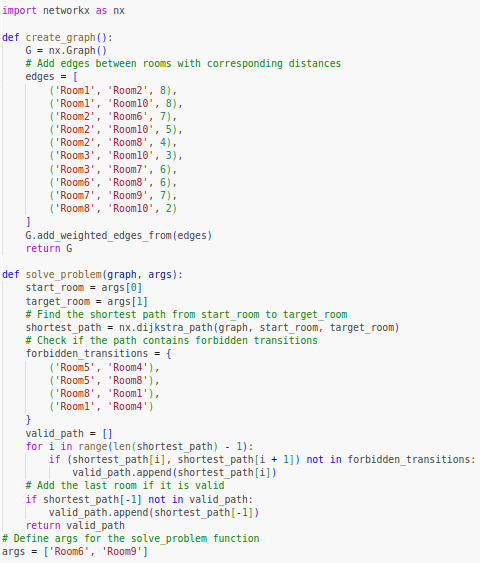
技术框架:NSP框架主要包括两个模块:一是利用大型语言模型生成环境的符号表示,二是执行符号路径规划算法。整个流程通过反馈循环进行自我纠正,确保生成的路径符合语法和时间约束。
关键创新:NSP的主要创新在于将神经网络与符号推理结合,形成一个闭环反馈机制,使得路径规划不仅高效且具备较高的正确性。这一方法与传统的单一符号或神经方法有本质区别。
关键设计:在设计中,NSP框架采用了特定的损失函数来优化路径生成的准确性,并通过调整网络结构以适应符号表示的生成需求。具体的参数设置和网络结构细节在实验部分有详细描述。
🖼️ 关键图片

📊 实验亮点
实验结果表明,NSP框架生成的有效路径比例达到90.1%,且路径长度比最先进的神经方法平均短19-77%。这一显著提升展示了NSP在路径规划任务中的优势,证明了其在实际应用中的潜力。
🎯 应用场景
该研究的潜在应用领域包括自动驾驶、服务机器人以及智能家居等场景。通过实现自然语言指令的路径规划,用户可以更直观地与机器人系统进行交互,提升操作的便利性和效率。未来,该技术有望在更多复杂环境中得到应用,推动机器人技术的进一步发展。
📄 摘要(原文)
Path planners that can interpret free-form natural language instructions hold promise to automate a wide range of robotics applications. These planners simplify user interactions and enable intuitive control over complex semi-autonomous systems. While existing symbolic approaches offer guarantees on the correctness and efficiency, they struggle to parse free-form natural language inputs. Conversely, neural approaches based on pre-trained Large Language Models (LLMs) can manage natural language inputs but lack performance guarantees. In this paper, we propose a neuro-symbolic framework for path planning from natural language inputs called NSP. The framework leverages the neural reasoning abilities of LLMs to i) craft symbolic representations of the environment and ii) a symbolic path planning algorithm. Next, a solution to the path planning problem is obtained by executing the algorithm on the environment representation. The framework uses a feedback loop from the symbolic execution environment to the neural generation process to self-correct syntax errors and satisfy execution time constraints. We evaluate our neuro-symbolic approach using a benchmark suite with 1500 path-planning problems. The experimental evaluation shows that our neuro-symbolic approach produces 90.1% valid paths that are on average 19-77% shorter than state-of-the-art neural approaches.