Visuospatial navigation from the bottom-up: without vestibular integration, distance prediction, or maps
作者: Patrick Govoni, Pawel Romanczuk
分类: cs.NE, cs.AI
发布日期: 2024-07-18 (更新: 2025-12-04)
💡 一句话要点
提出一种无需前庭整合、距离预测或地图构建的自下而上视觉空间导航方法
🎯 匹配领域: 支柱六:视频提取与匹配 (Video Extraction)
关键词: 视觉导航 自下而上 机器人导航 认知地图 路径规划
📋 核心要点
- 传统导航方法依赖认知地图,需要复杂的计算,如前庭整合和距离预测,这在资源受限情况下存在挑战。
- 论文提出一种纯粹基于视觉的自下而上导航方法,无需构建认知地图,直接从视觉感知进行路径决策。
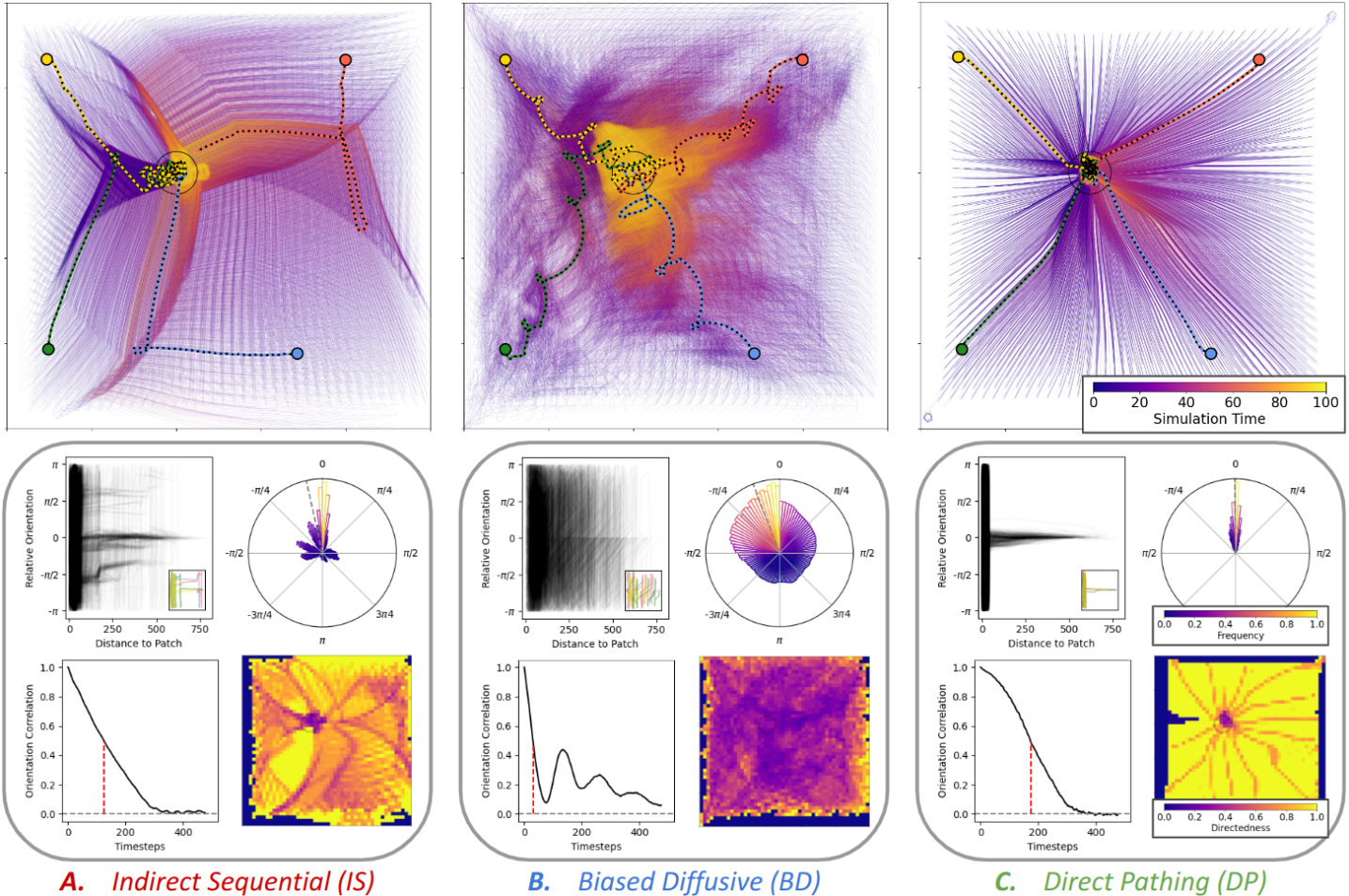
- 实验表明,该方法在开放场地导航任务中表现出色,涌现出三种不同的导航策略,与生物行为具有一致性。
📝 摘要(中文)
导航被认为由大脑中至少两个部分可分离的系统控制。认知地图告知生物体其位置和方位,并通过整合前庭自身运动或预测到地标的距离来更新。另一方面,基于路径的导航直接从即时感知评估连续的运动决策。本文证明了视觉的、基于路径的决策在经典开放场地导航任务中的充分性,而该任务通常被认为需要认知地图。出现了三种不同的策略来稳健地导航到隐藏的目标,每种策略都赋予了在神经和行为尺度上分析的上下文权衡,并且在质量上与在生物谱中观察到的行为对齐。我们建议从自下而上的角度重新构建导航,通过以自我为中心的、情景的视角,而不假设在线访问计算成本高的自上而下的表征,以更好地解释在能量或注意力约束下的行为。
🔬 方法详解
问题定义:现有的导航方法通常依赖于认知地图,这需要复杂的计算过程,例如前庭信息的整合以及对地标距离的预测。这些计算过程在计算资源或能量受限的情况下会变得非常困难。因此,如何在不依赖这些复杂计算的情况下实现有效的导航是一个重要的挑战。
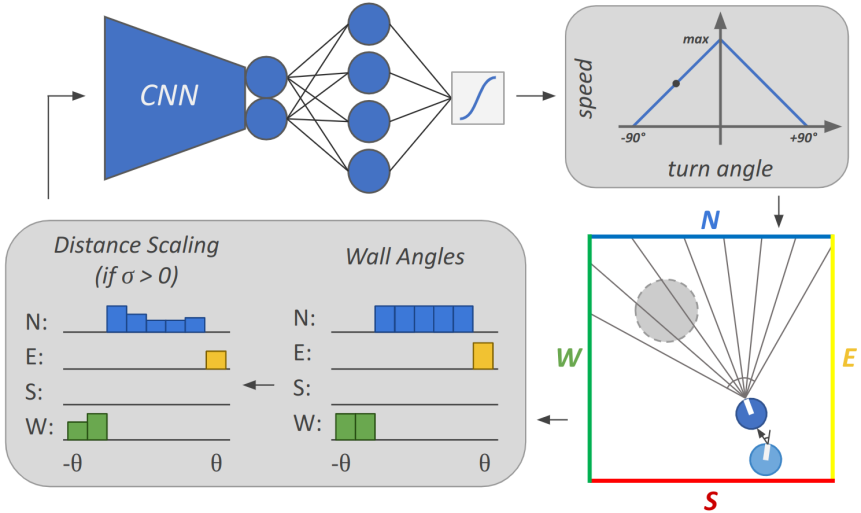
核心思路:本文的核心思路是提出一种完全基于视觉信息的自下而上的导航方法。这种方法避免了构建全局的认知地图,而是直接利用视觉感知信息来做出导航决策。通过这种方式,导航系统可以更加高效地利用有限的资源,并且能够更好地适应动态变化的环境。
技术框架:该研究采用经典的开放场地导航任务作为实验平台。研究人员设计了一个虚拟环境,其中包含一个隐藏的目标位置。导航代理通过观察环境中的视觉信息来做出运动决策,最终到达目标位置。研究人员观察并分析了代理在导航过程中涌现出的不同行为策略。
关键创新:该研究的关键创新在于证明了纯粹基于视觉信息的自下而上导航的有效性。与传统的基于认知地图的导航方法不同,该方法不需要进行复杂的前庭整合或距离预测,而是直接从视觉感知中提取有用的信息。这种方法更加简单高效,并且能够更好地适应资源受限的环境。
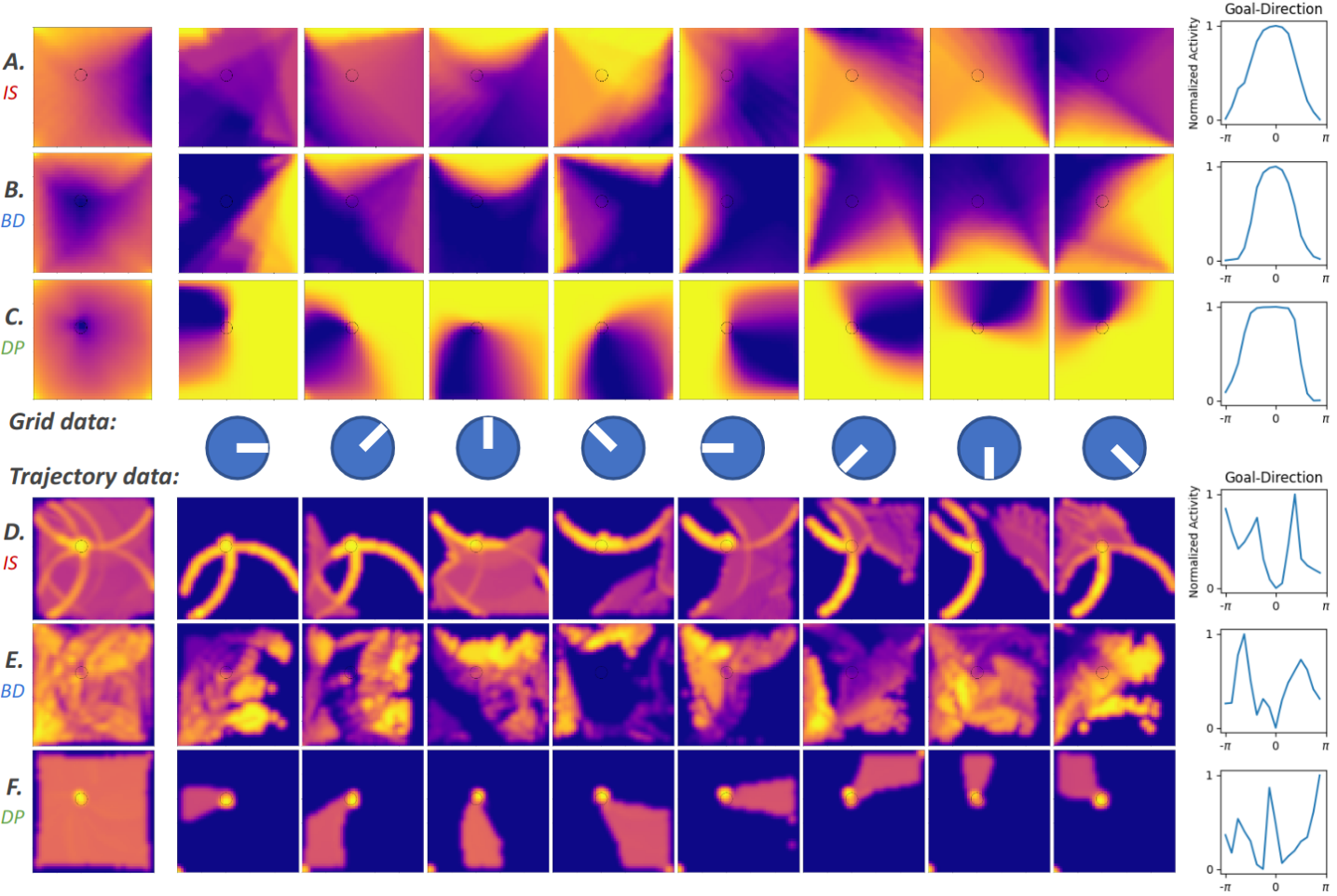
关键设计:研究人员设计了不同的实验条件,以探索不同的视觉导航策略。他们分析了代理在导航过程中产生的神经活动和行为数据,并发现了三种不同的导航策略。这些策略在不同的环境条件下表现出不同的优势,并且与生物体在实际导航过程中观察到的行为具有相似性。
🖼️ 关键图片
📊 实验亮点
该研究通过实验证明了纯视觉的自下而上导航方法在开放场地导航任务中的有效性。研究结果表明,该方法能够涌现出三种不同的导航策略,这些策略在不同的环境条件下表现出不同的优势。此外,这些策略与生物体在实际导航过程中观察到的行为具有相似性,表明该方法具有一定的生物学合理性。
🎯 应用场景
该研究成果可应用于资源受限的机器人导航,例如在计算能力有限或能量供应不足的情况下,机器人可以通过纯视觉导航完成任务。此外,该研究对于理解生物导航机制也具有重要意义,有助于揭示生物如何在没有复杂认知地图的情况下进行有效导航。未来,该方法可以扩展到更复杂的环境和任务中,例如室内导航、无人机导航等。
📄 摘要(原文)
Navigation is believed to be controlled by at least two partially dissociable systems in the brain. The cognitive map informs an organism of its location and bearing, updated by integrating vestibular self-motion or predicting distances to landmarks. Route-based navigation, on the other hand, directly evaluate sequential movement decisions from immediate percepts. Here we demonstrate the sufficiency of visual route-based decision-making in a classic open field navigation task often assumed to require a cognitive map. Three distinct strategies emerge to robustly navigate to a hidden goal, each conferring contextual tradeoffs analyzed at both neural and behavioral scales, as well as qualitatively aligning with behavior observed across the biological spectrum. We propose reframing navigation from the bottom-up, through an egocentric episodic perspective without assuming online access to computationally expensive top-down representations, to better explain behavior under energetic or attentional constraints.