Hybrid-Generative Diffusion Models for Attack-Oriented Twin Migration in Vehicular Metaverses
作者: Yingkai Kang, Jinbo Wen, Jiawen Kang, Tao Zhang, Hongyang Du, Dusit Niyato, Rong Yu, Shengli Xie
分类: cs.AI, cs.NI
发布日期: 2024-07-05
💡 一句话要点
提出混合生成扩散模型,解决车载元宇宙中面向攻击的车载孪生迁移问题
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture)
关键词: 车载元宇宙 车辆孪生 迁移策略 深度强化学习 混合生成扩散模型 信任评估 边缘计算
📋 核心要点
- 现有车载孪生迁移方案难以应对车辆高移动性、边缘服务器不均部署和潜在安全威胁。
- 提出混合生成扩散模型(GDM),结合深度强化学习,通过混合动作生成最优迁移决策。
- 实验结果表明,该算法优于基线算法,在各种设置中表现出强大的适应性。
📝 摘要(中文)
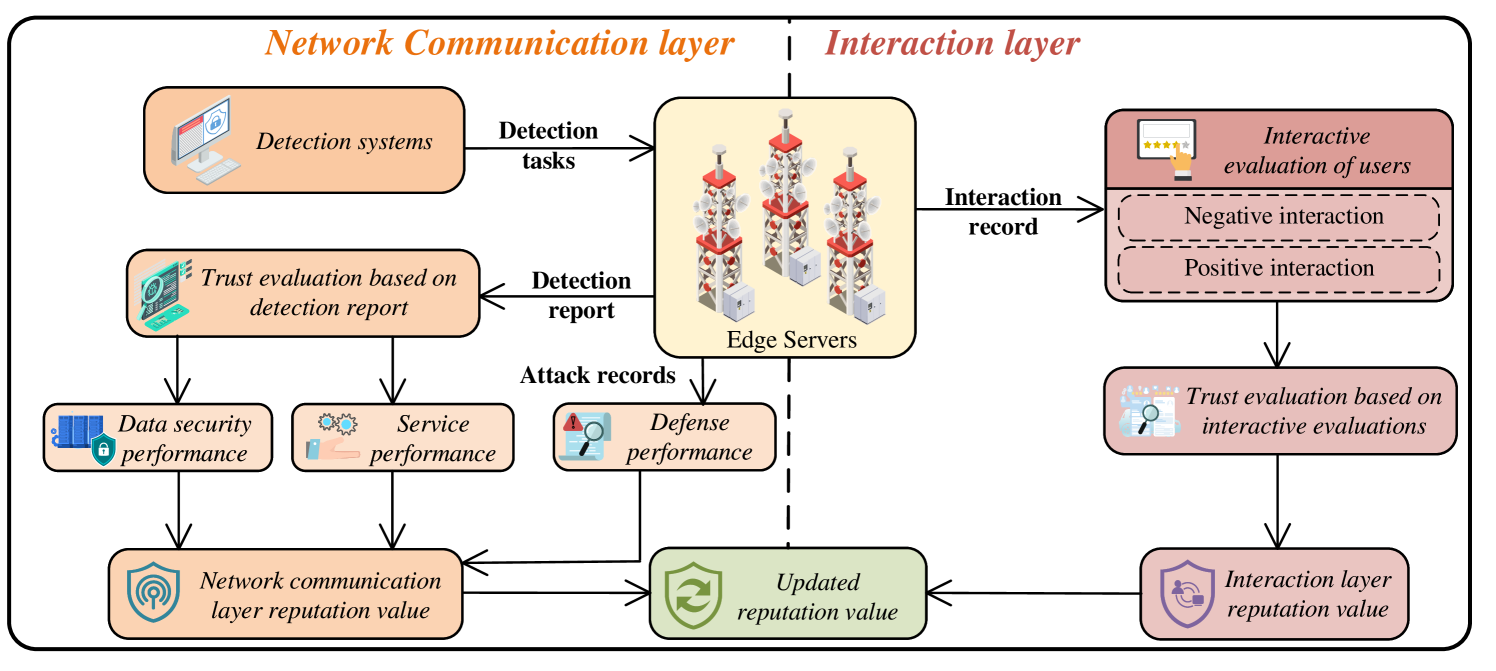
本文针对车载元宇宙中车辆孪生(VT)迁移问题,提出了一种安全可靠的VT迁移框架。车辆元宇宙旨在为汽车行业带来革命性变革,而VT作为其核心组件,为车辆元宇宙用户(VMU)提供沉浸式虚拟服务。由于车辆资源有限,需要将VT的构建和更新等计算密集型任务卸载到边缘服务器,并在服务器之间迁移VT,以确保VMU获得无缝沉浸体验。然而,车辆的高移动性、边缘服务器的不均匀部署以及潜在的安全威胁给高效可靠的VT迁移带来了挑战。为此,本文设计了一个双层信任评估模型,综合评估网络通信和交互层中边缘服务器的信誉值。然后,将VT迁移问题建模为部分可观测马尔可夫决策过程,并设计了一种基于深度强化学习的混合生成扩散模型(GDM)算法,通过混合动作(即连续动作和离散动作)生成最优迁移决策。数值结果表明,混合GDM算法优于基线算法,在各种设置中表现出强大的适应性,突出了该算法在解决车载元宇宙中各种优化问题的潜力。
🔬 方法详解
问题定义:论文旨在解决车载元宇宙中,由于车辆高移动性、边缘服务器不均匀部署以及潜在安全威胁导致的车辆孪生(VT)迁移效率和可靠性问题。现有方法难以在复杂动态环境下做出最优迁移决策,并且缺乏对边缘服务器信誉的有效评估,容易受到恶意攻击的影响。
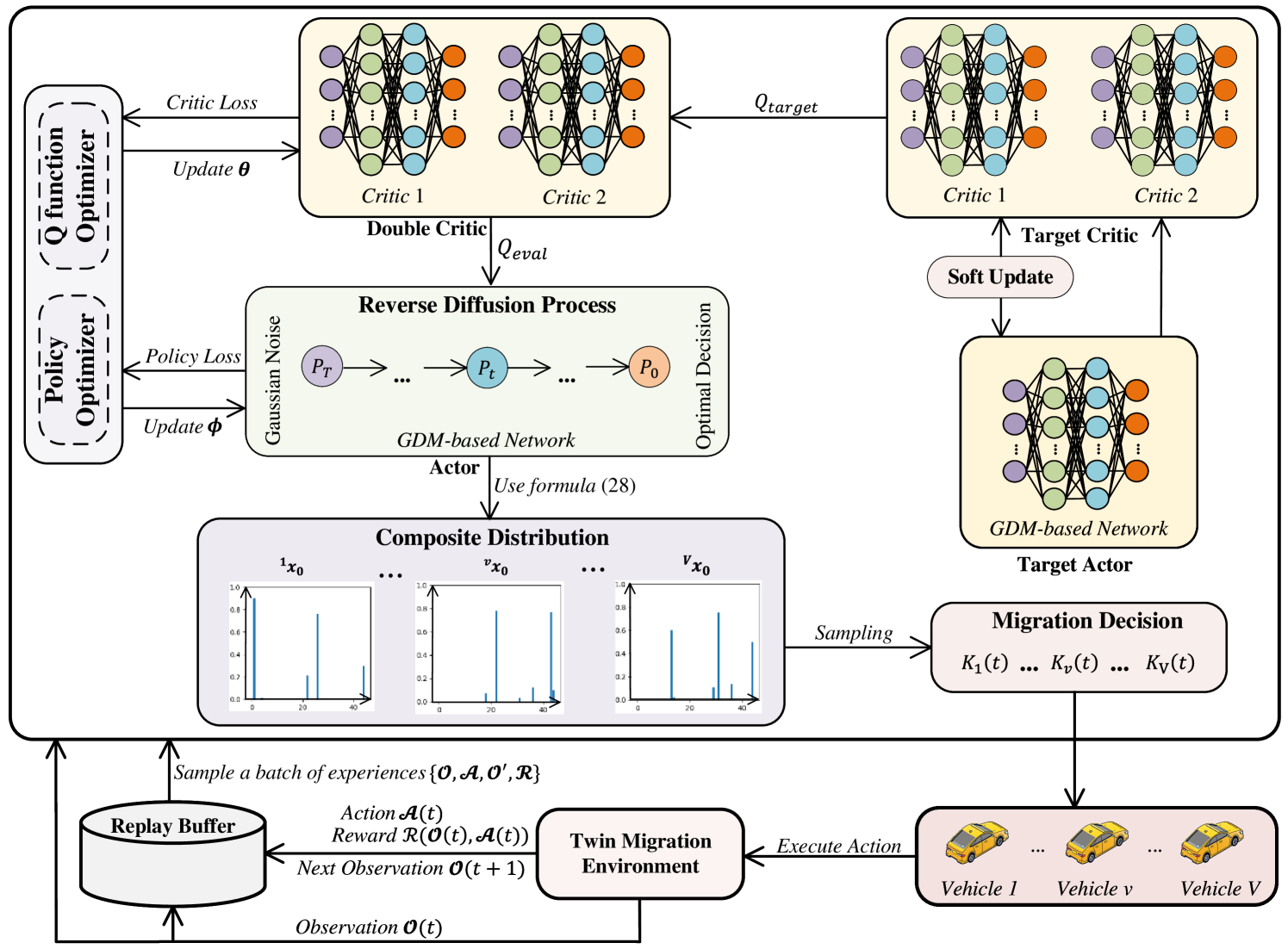
核心思路:论文的核心思路是将VT迁移问题建模为部分可观测马尔可夫决策过程(POMDP),并利用深度强化学习(DRL)训练一个能够生成最优迁移策略的智能体。关键在于设计一个混合生成扩散模型(GDM),使其能够同时处理连续动作(例如迁移速率)和离散动作(例如选择哪个边缘服务器),从而更灵活地适应不同的环境状态。此外,还引入双层信任评估模型,提高迁移的安全性。
技术框架:整体框架包含以下几个主要模块:1) 双层信任评估模块:用于评估边缘服务器的信誉值,包括网络通信层和交互层两个层面。2) 状态表示模块:将车辆和边缘服务器的状态信息编码为智能体的输入。3) 混合生成扩散模型(GDM):基于DRL,学习最优的VT迁移策略,输出混合动作。4) 迁移执行模块:根据GDM输出的动作,执行VT迁移操作。
关键创新:论文最重要的技术创新点在于提出了混合生成扩散模型(GDM),该模型能够同时处理连续动作和离散动作,这与传统的DRL算法只能处理单一类型的动作不同。这种混合动作空间的设计使得智能体能够更精细地控制VT迁移过程,从而获得更好的性能。此外,双层信任评估模型也增强了系统的安全性。
关键设计:GDM的具体实现细节未知,摘要中没有明确说明网络结构、损失函数等。双层信任评估模型的设计细节也未知,需要阅读全文才能了解。但可以推测,GDM可能采用了某种Actor-Critic结构,Actor网络负责生成动作,Critic网络负责评估动作的价值。损失函数可能包含强化学习中的奖励函数和一些正则化项,以提高模型的稳定性和泛化能力。
🖼️ 关键图片

📊 实验亮点
数值结果表明,所提出的混合GDM算法在各种设置下均优于基线算法,展现出强大的适应性。具体的性能提升数据未知,但摘要强调了该算法在解决车载元宇宙中各种优化问题的潜力。实验结果验证了混合GDM算法在VT迁移问题上的有效性,并为未来的研究提供了新的思路。
🎯 应用场景
该研究成果可应用于车载元宇宙、智能交通系统等领域,为用户提供更流畅、安全的虚拟体验。通过优化车辆孪生迁移策略,可以降低网络延迟、提高资源利用率,并有效防御潜在的网络攻击,从而提升整个系统的可靠性和安全性。未来,该技术还可扩展到其他类型的数字孪生应用场景,例如工业元宇宙、智慧城市等。
📄 摘要(原文)
The vehicular metaverse is envisioned as a blended immersive domain that promises to bring revolutionary changes to the automotive industry. As a core component of vehicular metaverses, Vehicle Twins (VTs) are digital twins that cover the entire life cycle of vehicles, providing immersive virtual services for Vehicular Metaverse Users (VMUs). Vehicles with limited resources offload the computationally intensive tasks of constructing and updating VTs to edge servers and migrate VTs between these servers, ensuring seamless and immersive experiences for VMUs. However, the high mobility of vehicles, uneven deployment of edge servers, and potential security threats pose challenges to achieving efficient and reliable VT migrations. To address these issues, we propose a secure and reliable VT migration framework in vehicular metaverses. Specifically, we design a two-layer trust evaluation model to comprehensively evaluate the reputation value of edge servers in the network communication and interaction layers. Then, we model the VT migration problem as a partially observable Markov decision process and design a hybrid-Generative Diffusion Model (GDM) algorithm based on deep reinforcement learning to generate optimal migration decisions by taking hybrid actions (i.e., continuous actions and discrete actions). Numerical results demonstrate that the hybrid-GDM algorithm outperforms the baseline algorithms, showing strong adaptability in various settings and highlighting the potential of the hybrid-GDM algorithm for addressing various optimization issues in vehicular metaverses.