PlaMo: Plan and Move in Rich 3D Physical Environments
作者: Assaf Hallak, Gal Dalal, Chen Tessler, Kelly Guo, Shie Mannor, Gal Chechik
分类: cs.AI, cs.GR, cs.RO
发布日期: 2024-06-26
💡 一句话要点
PlaMo:在复杂3D物理环境中规划和移动人形机器人
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 人形机器人控制 运动规划 物理模拟 强化学习 3D环境 自主导航 场景感知
📋 核心要点
- 现有方法难以在复杂3D物理环境中有效控制人形机器人,尤其是在考虑场景约束和实时变化时。
- PlaMo通过结合场景感知的路径规划器和鲁棒的物理控制器,实现人形机器人在复杂环境中的自主导航和运动。
- 实验表明,PlaMo能够使人形机器人在复杂地形中以多种方式移动,并能实时响应环境变化。
📝 摘要(中文)
在复杂的物理模拟世界中控制人形机器人是一个长期存在的挑战,在游戏、模拟和视觉内容创作等领域有广泛的应用。本文提出PlaMo,一个场景感知的路径规划器和一个鲁棒的基于物理的控制器,以解决该问题。给定一个丰富而复杂的3D场景,用户提供由目标位置和运动类型组成的指令列表。路径规划器产生一系列运动路径,同时考虑场景对运动的各种限制,例如位置、高度和速度。作为规划器的补充,我们的控制策略生成丰富而逼真的物理运动,并遵守规划。我们展示了这两个模块的结合如何能够在各种形式下穿越复杂的景观,同时响应环境中的实时变化。
🔬 方法详解
问题定义:论文旨在解决在复杂3D物理环境中,如何让人形机器人根据用户指令(目标位置和运动类型)进行自主导航和运动的问题。现有方法在处理复杂场景约束(如高度、速度限制)以及实时环境变化时存在不足,难以生成自然流畅的运动。
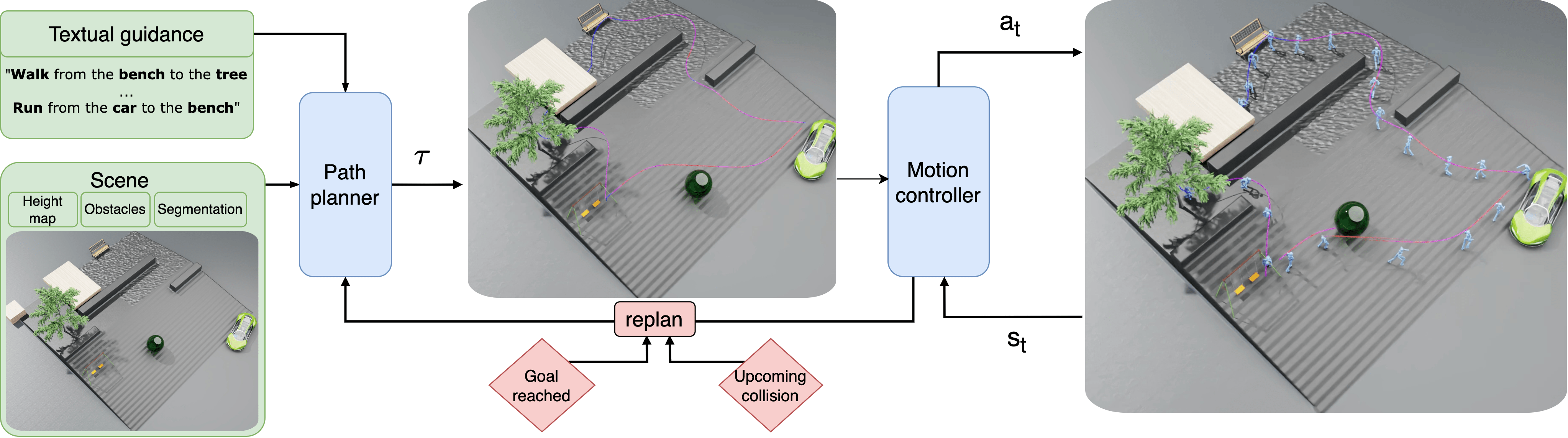
核心思路:PlaMo的核心思路是将运动规划和物理控制解耦,分别由场景感知的路径规划器和鲁棒的物理控制器实现。路径规划器负责生成全局运动路径,考虑场景约束;物理控制器负责执行规划的路径,生成逼真的物理运动。
技术框架:PlaMo包含两个主要模块:1) 场景感知的路径规划器:该模块接收用户指令和3D场景信息,生成一系列运动路径,考虑到场景的位置、高度和速度限制。2) 鲁棒的物理控制器:该模块接收路径规划器的输出,生成符合物理规律的运动,使人形机器人能够按照规划的路径移动。这两个模块协同工作,实现人形机器人在复杂环境中的自主导航和运动。
关键创新:PlaMo的关键创新在于将场景感知的路径规划与鲁棒的物理控制相结合,实现了在复杂3D物理环境中人形机器人的自主导航和运动。这种结合使得机器人能够更好地理解和适应环境,生成更自然流畅的运动。
关键设计:路径规划器可能采用了A*或RRT等搜索算法,并结合了场景的几何信息和运动学约束。物理控制器可能采用了强化学习或模型预测控制等方法,以实现对人形机器人的精确控制和鲁棒性。具体的参数设置、损失函数和网络结构等细节在论文中可能有所描述,但具体实现细节未知。
🖼️ 关键图片


📊 实验亮点
论文展示了PlaMo在复杂地形中控制人形机器人运动的能力,能够使其以多种方式穿越复杂景观,并能实时响应环境变化。虽然论文摘要中没有提供具体的性能数据或对比基线,但视频展示了PlaMo在复杂场景下的有效性,表明其在人形机器人控制方面具有显著优势。
🎯 应用场景
PlaMo具有广泛的应用前景,包括游戏开发(创建更逼真的角色动画)、物理模拟(模拟复杂环境中的人类行为)、视觉内容创作(生成高质量的动画内容)以及机器人研究(开发更智能的自主机器人)。该研究成果有助于提升虚拟环境的真实感和交互性,并为机器人技术的发展提供新的思路。
📄 摘要(原文)
Controlling humanoids in complex physically simulated worlds is a long-standing challenge with numerous applications in gaming, simulation, and visual content creation. In our setup, given a rich and complex 3D scene, the user provides a list of instructions composed of target locations and locomotion types. To solve this task we present PlaMo, a scene-aware path planner and a robust physics-based controller. The path planner produces a sequence of motion paths, considering the various limitations the scene imposes on the motion, such as location, height, and speed. Complementing the planner, our control policy generates rich and realistic physical motion adhering to the plan. We demonstrate how the combination of both modules enables traversing complex landscapes in diverse forms while responding to real-time changes in the environment. Video: https://youtu.be/wWlqSQlRZ9M .