Quick and Accurate Affordance Learning
作者: Fedor Scholz, Erik Ayari, Johannes Bertram, Martin V. Butz
分类: cs.AI, cs.LG
发布日期: 2024-05-13
💡 一句话要点
提出基于深度学习的主动式可供性学习框架,模拟婴儿环境探索行为。
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 可供性学习 主动探索 深度学习 认知地图 不确定性度量 Jensen-Shannon散度 机器人自主学习
📋 核心要点
- 现有方法难以有效模拟婴儿主动探索环境并学习可供性的过程。
- 提出一种深度学习架构,结合认知地图探索和局部可供性学习,主动引导智能体探索。
- 实验对比了三种不确定性度量,发现Jensen-Shannon散度(JSD)能实现更平衡的探索策略。
📝 摘要(中文)
本文提出了一种基于深度学习架构的模型,用于模拟婴儿在环境中主动学习可供性的行为,即局部环境如何决定行为对环境产生的影响。该架构协调了全局认知地图探索和局部可供性学习。推断过程主动引导模拟智能体前往预期能获得可供性相关知识的区域。论文对比了三种不确定性度量来指导探索:模型预测的不确定性、多个模型均值之间的标准差(SD)以及多个模型之间的Jensen-Shannon散度(JSD)。结果表明,第一种度量容易受到环境中固有偶然不确定性的干扰,而后两种度量则侧重于认知不确定性。JSD表现出最平衡的探索策略。从计算角度来看,该模型提出了协调主动生成学习课程的三个关键要素:(1)导航行为需要与局部运动行为协调,以实现主动可供性学习。(2)可供性需要在局部进行编码,以获取广义知识。(3)有效的积极可供性学习机制应使用密度比较技术来估计预期的知识增益。未来的工作可能会寻求与发展心理学的合作,以在更真实的场景中模拟儿童的主动游戏。
🔬 方法详解
问题定义:论文旨在解决如何让智能体像婴儿一样,通过主动探索环境来学习可供性(affordance)的问题。现有方法通常依赖于被动观察或预定义的探索策略,无法有效地模拟婴儿在复杂环境中自主学习的过程,尤其是在面对环境中的不确定性时,容易陷入局部最优或被偶然因素误导。
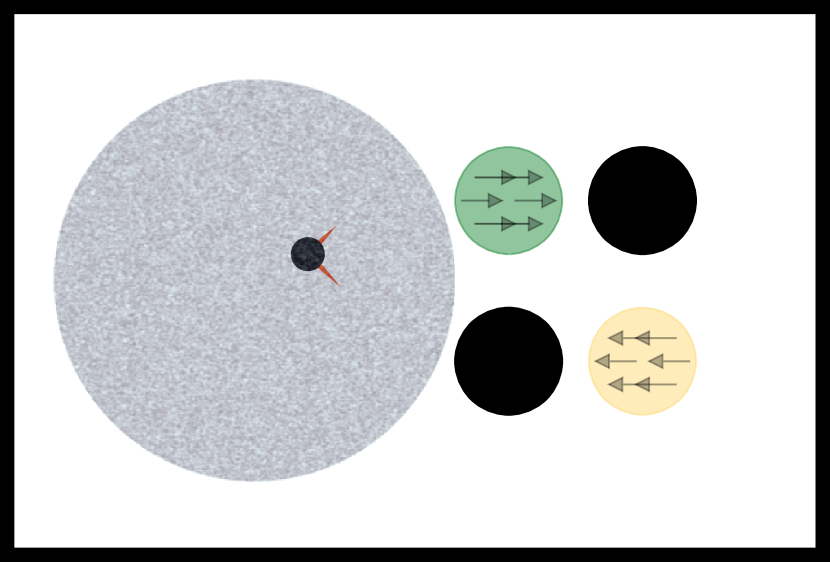
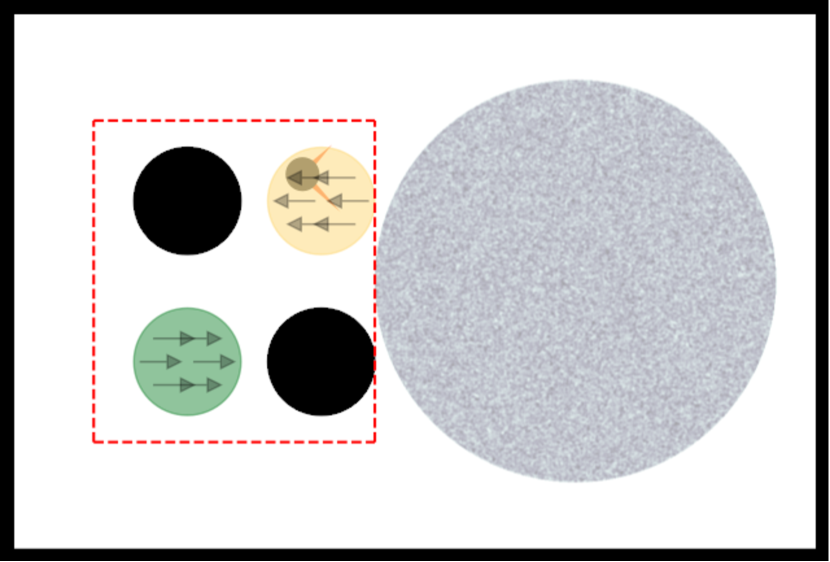
核心思路:论文的核心思路是将全局认知地图的探索与局部可供性学习相结合。通过主动引导智能体前往预期能获得可供性相关知识的区域,实现更高效的学习。这种主动探索策略模仿了婴儿在真实世界中的学习方式,即根据自身的好奇心和对环境的预期来选择行动。
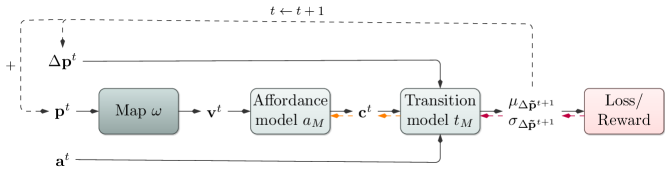
技术框架:整体架构包含以下几个主要模块:1) 全局认知地图:用于存储和更新环境的整体信息。2) 局部可供性学习模块:负责学习局部环境中的可供性。3) 不确定性度量模块:用于评估不同区域的知识增益潜力,指导智能体的探索方向。4) 导航模块:根据不确定性度量结果,引导智能体前往高潜力区域。整个流程是循环迭代的:智能体根据当前认知地图和不确定性评估选择行动,执行行动后更新认知地图和可供性模型,然后再次进行不确定性评估和行动选择。
关键创新:最重要的技术创新点在于使用密度比较技术(Jensen-Shannon Divergence, JSD)来估计预期的知识增益。与传统的基于模型预测不确定性的方法相比,JSD能够更好地区分认知不确定性(epistemic uncertainty)和偶然不确定性(aleatoric uncertainty),从而避免被环境中的噪声所误导,更有效地引导智能体探索未知的、有价值的区域。
关键设计:论文中,不确定性度量模块是关键。除了JSD,还对比了模型预测的不确定性和多个模型均值之间的标准差(SD)。JSD的计算方式是比较多个模型预测结果的概率分布之间的差异,差异越大,说明模型对该区域的认知不确定性越高,探索价值越大。具体的网络结构和损失函数等细节未在摘要中详细说明,属于未知信息。
🖼️ 关键图片
📊 实验亮点
实验结果表明,使用Jensen-Shannon散度(JSD)作为不确定性度量能够实现最平衡的探索策略,避免了模型预测不确定性容易被偶然不确定性误导的问题。虽然摘要中没有给出具体的性能数据和提升幅度,但强调了JSD在引导智能体探索认知不确定性方面的优势。
🎯 应用场景
该研究成果可应用于机器人自主探索、游戏AI、以及教育领域。例如,可以开发更智能的机器人,使其能够在未知环境中自主学习和适应;也可以用于设计更具挑战性和趣味性的游戏AI,模拟真实玩家的学习过程;此外,该模型还可以为儿童早期教育提供理论指导,帮助设计更有效的学习环境和课程。
📄 摘要(原文)
Infants learn actively in their environments, shaping their own learning curricula. They learn about their environments' affordances, that is, how local circumstances determine how their behavior can affect the environment. Here we model this type of behavior by means of a deep learning architecture. The architecture mediates between global cognitive map exploration and local affordance learning. Inference processes actively move the simulated agent towards regions where they expect affordance-related knowledge gain. We contrast three measures of uncertainty to guide this exploration: predicted uncertainty of a model, standard deviation between the means of several models (SD), and the Jensen-Shannon Divergence (JSD) between several models. We show that the first measure gets fooled by aleatoric uncertainty inherent in the environment, while the two other measures focus learning on epistemic uncertainty. JSD exhibits the most balanced exploration strategy. From a computational perspective, our model suggests three key ingredients for coordinating the active generation of learning curricula: (1) Navigation behavior needs to be coordinated with local motor behavior for enabling active affordance learning. (2) Affordances need to be encoded locally for acquiring generalized knowledge. (3) Effective active affordance learning mechanisms should use density comparison techniques for estimating expected knowledge gain. Future work may seek collaborations with developmental psychology to model active play in children in more realistic scenarios.