Integrating Intent Understanding and Optimal Behavior Planning for Behavior Tree Generation from Human Instructions
作者: Xinglin Chen, Yishuai Cai, Yunxin Mao, Minglong Li, Wenjing Yang, Weixia Xu, Ji Wang
分类: cs.AI, cs.HC, cs.RO
发布日期: 2024-05-13 (更新: 2024-06-27)
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
提出基于LLM和OBTEA的两阶段框架,从人类指令生成最优行为树
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 行为树生成 意图理解 大型语言模型 最优行为规划 服务机器人
📋 核心要点
- 现有行为树生成方法要么不涉及自然语言理解,要么无法在理论上保证行为树的成功执行。
- 该论文提出了一种两阶段框架,利用大型语言模型进行意图理解,并使用最优行为树扩展算法构建高效的行为树。
- 实验表明,该框架能够生成语法正确且准确的目标,并且在性能上优于基线方法,具有实际部署价值。
📝 摘要(中文)
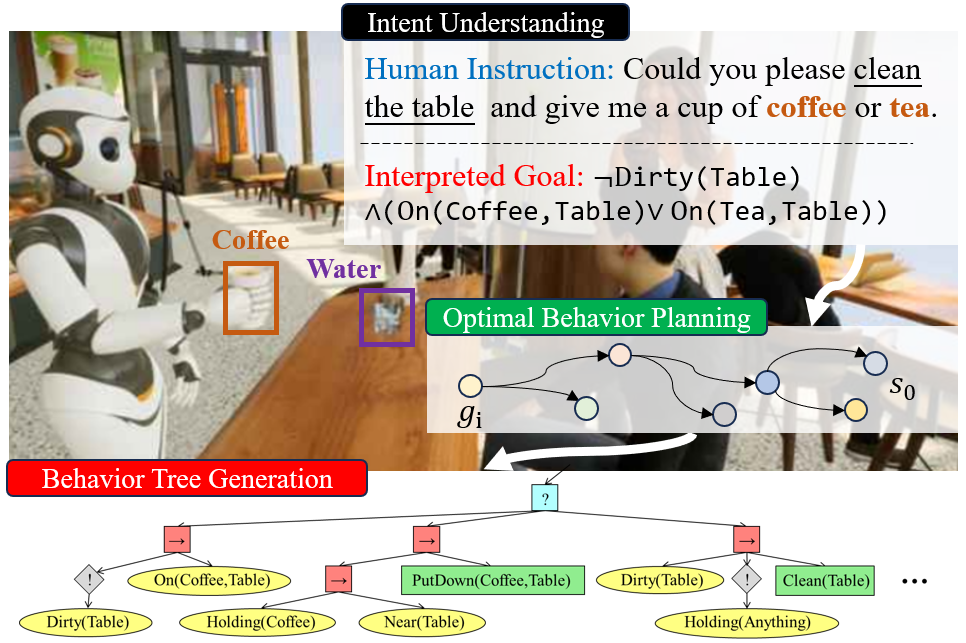
本文提出了一种两阶段框架,用于从人类指令生成行为树(BT),旨在提高机器人执行任务时的适应性和可靠性。该框架首先利用大型语言模型(LLM)从高层指令中解析目标,然后通过最优行为树扩展算法(OBTEA)构建高效的、特定于目标的BT。论文将目标表示为一阶逻辑中的良好形式公式,从而有效地连接了意图理解和最优行为规划。在服务机器人上的实验验证了LLM在生成语法正确和准确解释的目标方面的能力,证明了OBTEA在各种指标上优于基线BT扩展算法,并最终证实了该框架的实际可部署性。
🔬 方法详解
问题定义:现有方法在从人类指令生成行为树时存在两个主要痛点:一是缺乏自然语言理解能力,无法直接从人类指令中提取目标;二是生成的行为树无法保证其最优性或成功执行,导致机器人任务执行效率低下或失败。
核心思路:该论文的核心思路是将人类指令转化为一阶逻辑公式表示的目标,然后利用最优行为树扩展算法(OBTEA)来构建能够实现这些目标的最优行为树。这种方法将意图理解和行为规划相结合,从而能够生成既符合人类意图又具有最优性能的行为树。
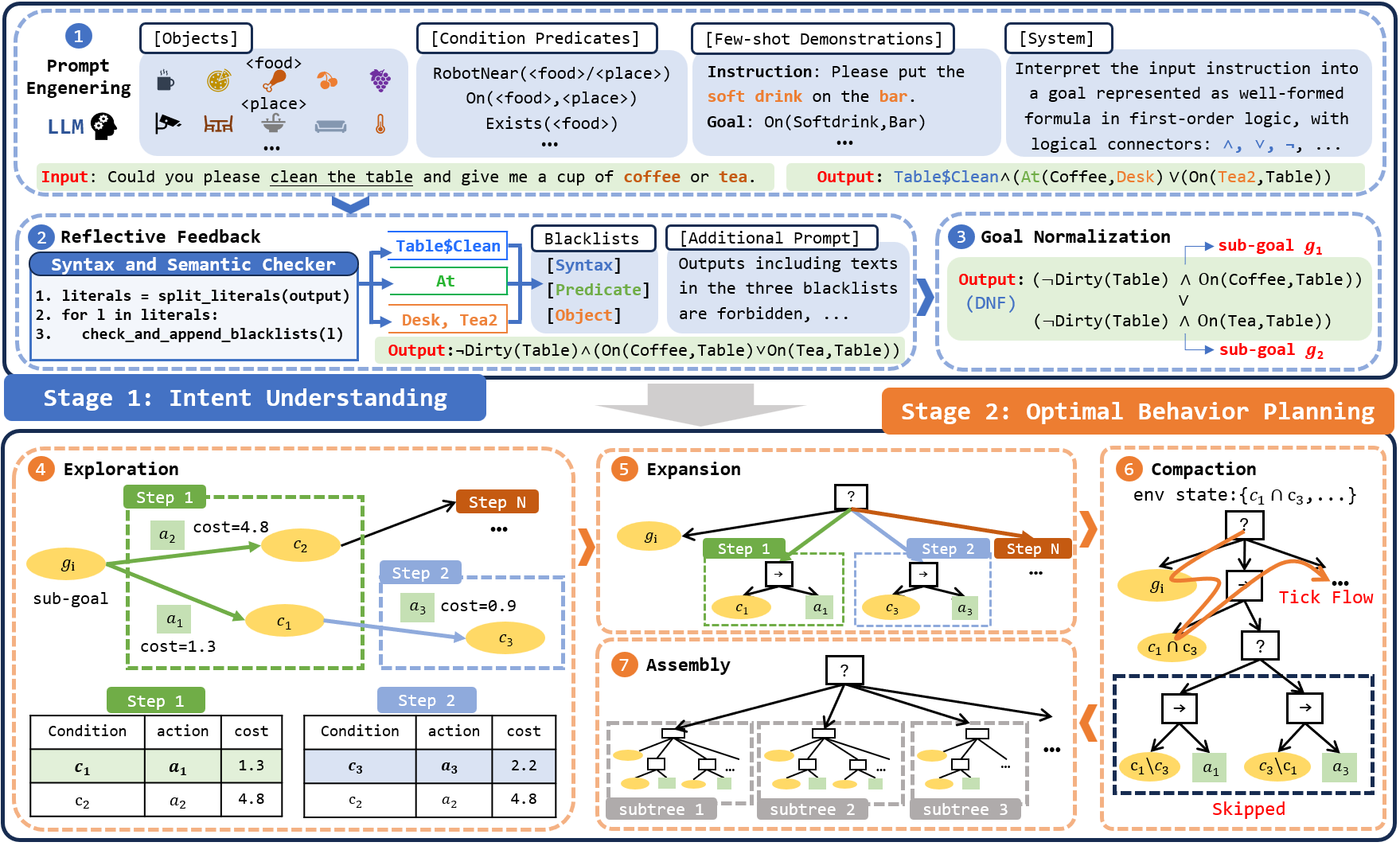
技术框架:该框架包含两个主要阶段:1) 意图理解阶段:使用大型语言模型(LLM)解析人类指令,并将其转化为一阶逻辑公式表示的目标。LLM负责理解指令的语义并提取关键信息,例如任务目标、约束条件等。2) 行为树生成阶段:使用最优行为树扩展算法(OBTEA)根据一阶逻辑公式表示的目标构建行为树。OBTEA算法通过搜索所有可能的行为树结构,并根据预定义的优化目标(例如执行时间、资源消耗等)选择最优的行为树。
关键创新:该论文的关键创新在于将大型语言模型和最优行为树扩展算法相结合,实现从人类指令到最优行为树的自动生成。具体来说,利用LLM进行意图理解,将自然语言指令转化为形式化的逻辑表示,为后续的行为树生成提供了可靠的基础。同时,OBTEA算法能够保证生成的行为树在满足目标约束的前提下具有最优性能。
关键设计:论文中,一阶逻辑公式用于精确描述任务目标和约束。OBTEA算法的具体实现细节(例如搜索策略、优化目标、剪枝策略等)未在摘要中详细描述,属于关键设计部分,具体细节未知。LLM的选择和prompt设计对意图理解的准确性至关重要,具体细节未知。
🖼️ 关键图片
📊 实验亮点
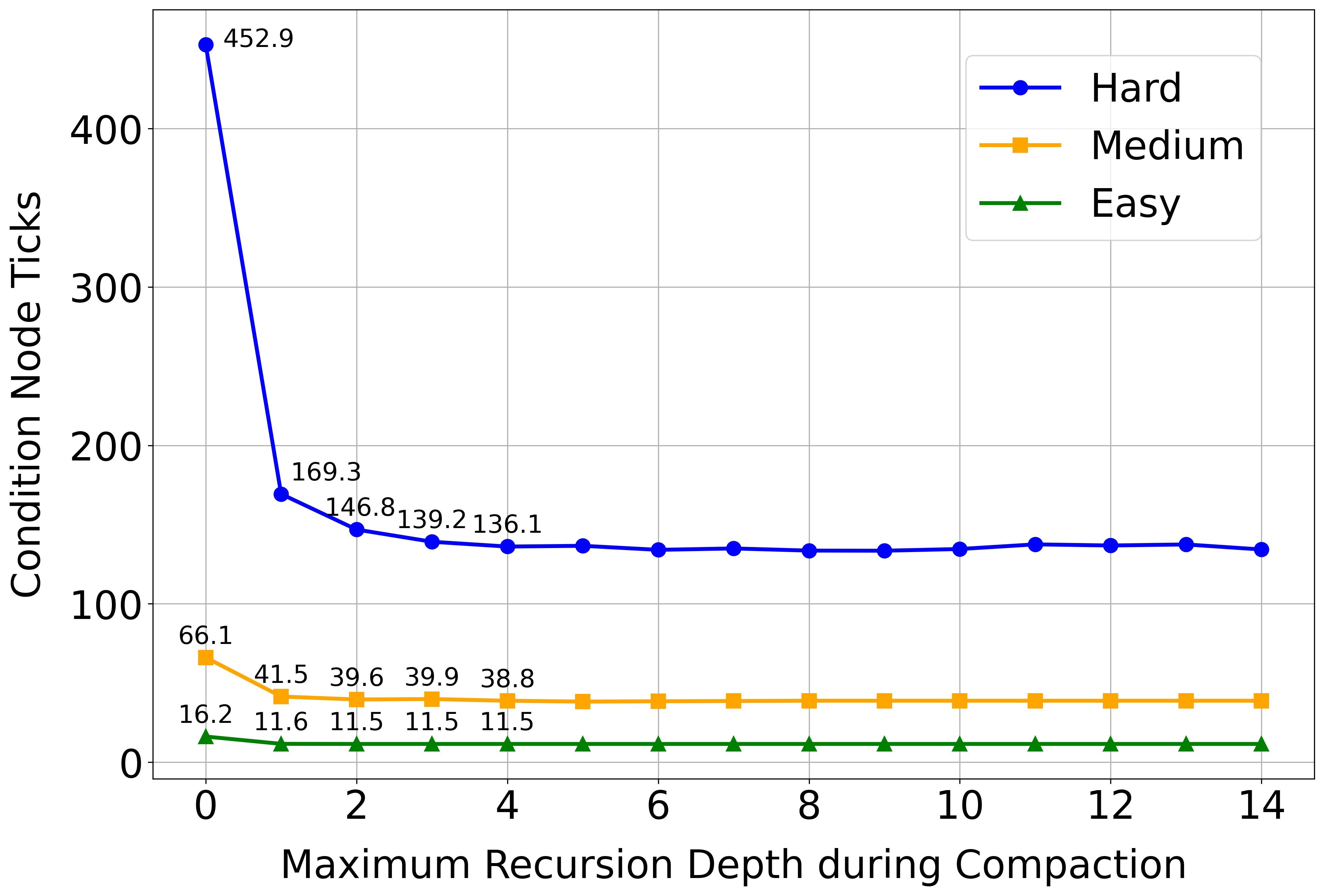
实验结果表明,该框架中的LLM能够生成语法正确且准确解释的目标。OBTEA算法在各种指标上优于基线BT扩展算法,表明其能够生成更优的行为树。最终,实验证实了该框架的实际可部署性,意味着其可以在真实机器人应用中有效运行。
🎯 应用场景
该研究成果可广泛应用于服务机器人、工业机器人等领域,使机器人能够更好地理解人类指令并高效地完成任务。例如,在家庭服务场景中,机器人可以根据用户的自然语言指令自动生成行为树,完成清洁、烹饪等任务。在工业自动化场景中,机器人可以根据操作员的指令自动调整工作流程,提高生产效率。
📄 摘要(原文)
Robots executing tasks following human instructions in domestic or industrial environments essentially require both adaptability and reliability. Behavior Tree (BT) emerges as an appropriate control architecture for these scenarios due to its modularity and reactivity. Existing BT generation methods, however, either do not involve interpreting natural language or cannot theoretically guarantee the BTs' success. This paper proposes a two-stage framework for BT generation, which first employs large language models (LLMs) to interpret goals from high-level instructions, then constructs an efficient goal-specific BT through the Optimal Behavior Tree Expansion Algorithm (OBTEA). We represent goals as well-formed formulas in first-order logic, effectively bridging intent understanding and optimal behavior planning. Experiments in the service robot validate the proficiency of LLMs in producing grammatically correct and accurately interpreted goals, demonstrate OBTEA's superiority over the baseline BT Expansion algorithm in various metrics, and finally confirm the practical deployability of our framework. The project website is https://dids-ei.github.io/Project/LLM-OBTEA/.