Large Language Models for UAVs: Current State and Pathways to the Future
作者: Shumaila Javaid, Nasir Saeed, Bin He
分类: cs.AI, cs.LG, cs.RO
发布日期: 2024-05-02
💡 一句话要点
探索LLM在无人机中的应用:综述架构、机遇与未来方向
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 无人机 大型语言模型 自主系统 人工智能 机器学习 数据分析 决策制定 频谱感知
📋 核心要点
- 现有无人机在复杂环境下的自主决策能力不足,难以有效处理海量数据并快速响应突发事件。
- 论文核心思想是探索将大型语言模型(LLM)集成到无人机系统中,利用LLM强大的学习和推理能力提升无人机的自主性。
- 论文综述了LLM架构在无人机中的适用性,并探讨了LLM在数据分析、决策制定和频谱感知等方面的应用潜力。
📝 摘要(中文)
无人机(UAV)已成为一种变革性技术,在军事和民用领域为复杂挑战提供适应性解决方案。通过集成人工智能(AI)和机器学习(ML)算法等先进计算工具,无人机的能力得到进一步提升。大型语言模型(LLM)作为AI的关键组成部分,在部署环境中表现出卓越的学习和适应能力,展现出一种不断发展的智能形式,具有接近人类水平的潜力。本文探讨了集成无人机和LLM以推动自主系统发展的巨大潜力。我们全面回顾了LLM架构,评估了它们对无人机集成的适用性。此外,我们总结了基于LLM的无人机架构的最新进展,并确定了在无人机框架内嵌入LLM的新机会。我们特别关注利用LLM来改进数据分析和决策过程,尤其是在无人机应用中增强频谱感知和共享。此外,我们还研究了LLM集成如何扩展现有无人机应用范围,从而在灾难响应和网络恢复等紧急情况下实现自主数据处理、改进决策制定和加快响应速度。最后,我们强调了未来研究的关键领域,这些领域对于促进LLM和无人机的有效集成至关重要。
🔬 方法详解
问题定义:现有无人机在复杂环境下的自主决策能力不足,难以有效处理海量数据并快速响应突发事件。现有的无人机系统在数据分析、决策制定和频谱感知等方面存在局限性,无法充分利用无人机收集的大量数据,并且在紧急情况下响应速度较慢。
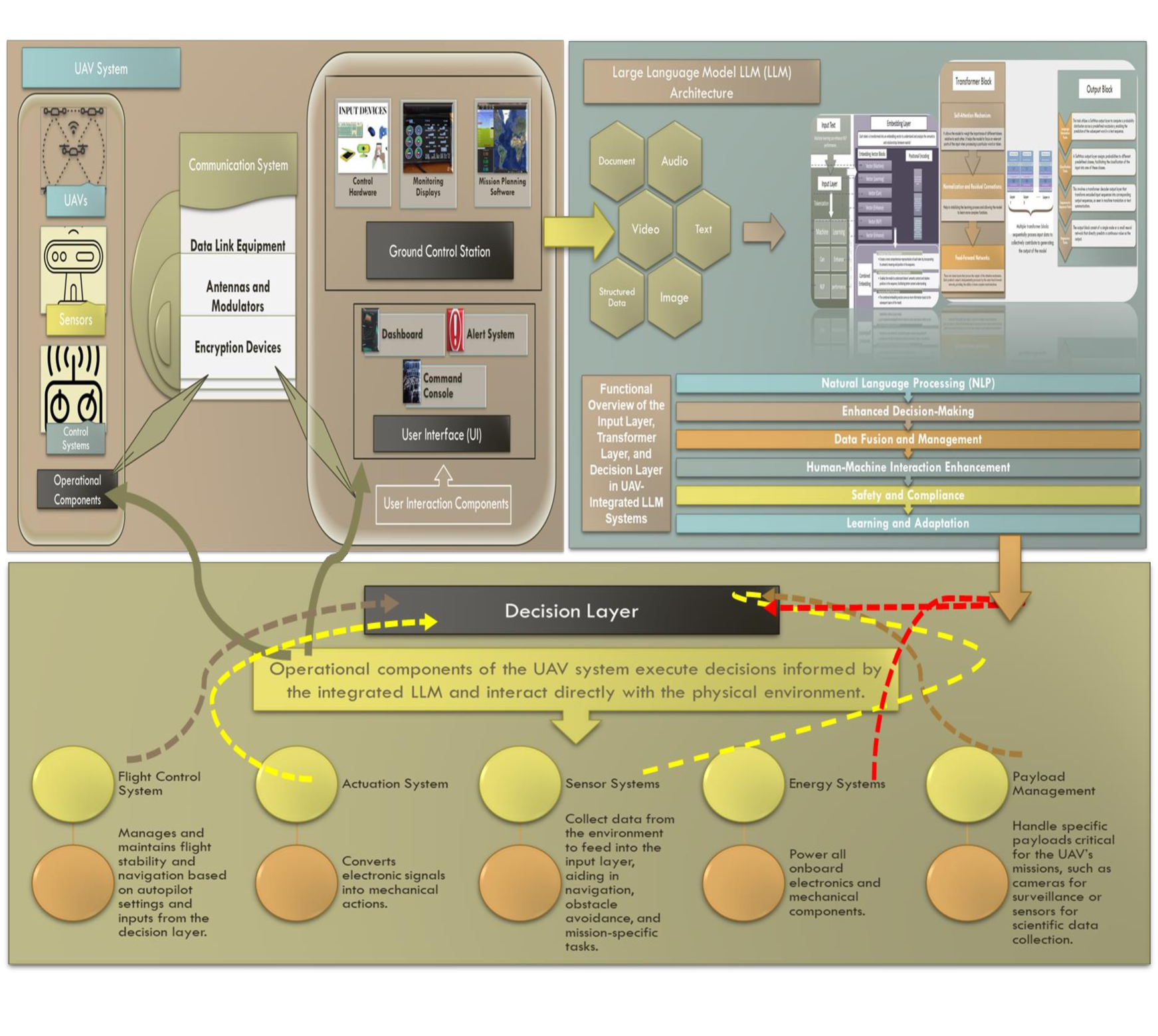
核心思路:论文的核心解决思路是将大型语言模型(LLM)集成到无人机系统中,利用LLM强大的学习和推理能力提升无人机的自主性。通过LLM,无人机可以更好地理解环境信息,进行更智能的决策,并更快地响应突发事件。
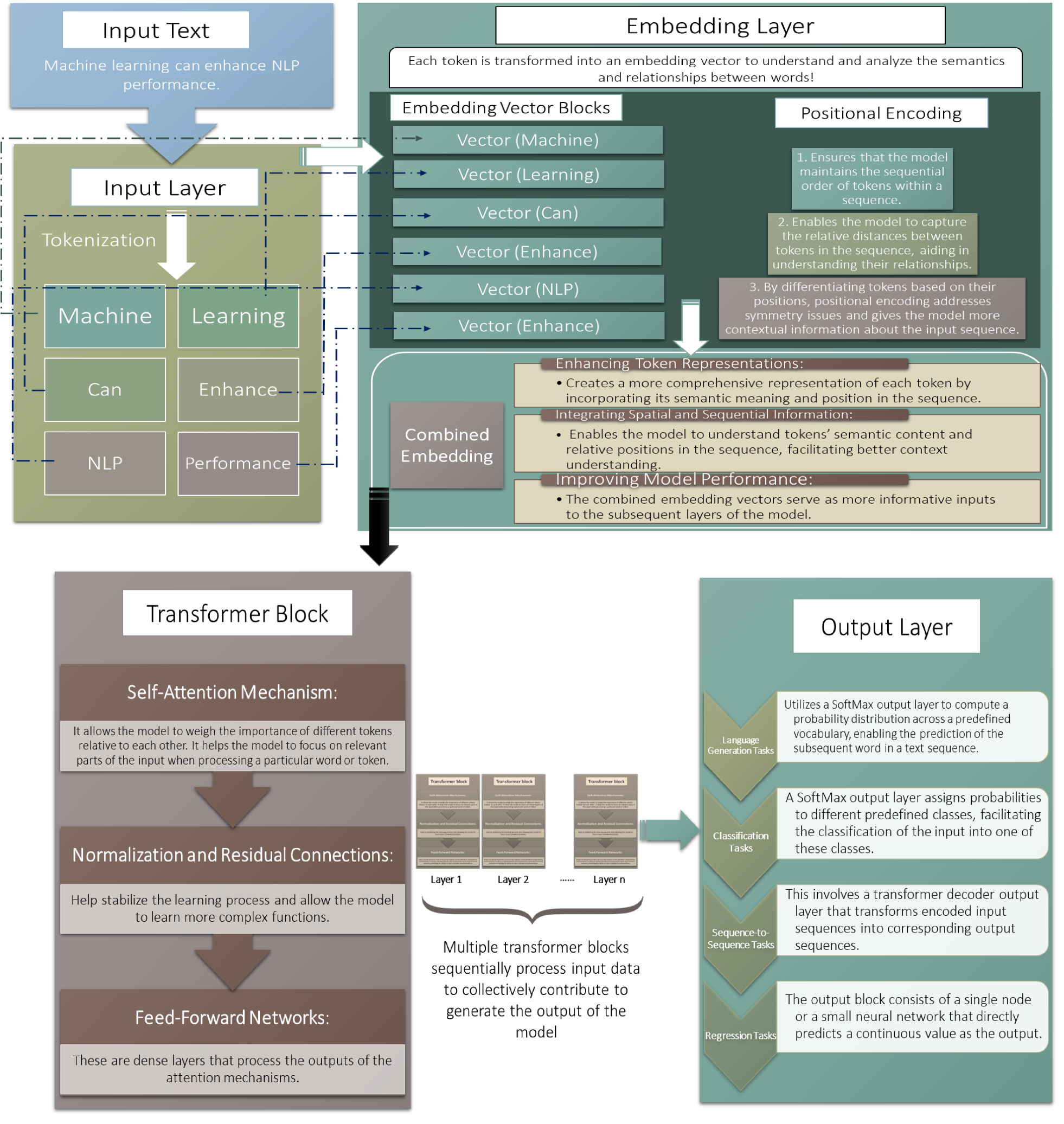
技术框架:论文主要从以下几个方面展开:1)回顾了LLM的架构,并评估了其在无人机集成中的适用性;2)总结了基于LLM的无人机架构的最新进展;3)探讨了LLM在无人机数据分析、决策制定和频谱感知等方面的应用;4)提出了未来研究的关键领域,以促进LLM和无人机的有效集成。
关键创新:论文的关键创新在于提出了将LLM集成到无人机系统中,以提升无人机的自主性和智能化水平。与现有方法相比,该方法能够更好地利用无人机收集的大量数据,实现更智能的决策,并更快地响应突发事件。
关键设计:论文主要关注LLM在无人机中的应用,并未涉及具体的参数设置、损失函数、网络结构等技术细节。未来的研究可以针对具体的应用场景,设计更有效的LLM模型和训练方法,以提升无人机的性能。
🖼️ 关键图片

📊 实验亮点
论文主要是一篇综述性文章,重点在于对LLM在无人机领域应用潜力的分析和展望,并未提供具体的实验结果。文章总结了当前基于LLM的无人机架构的最新进展,并指出了未来研究的关键方向,为后续研究提供了重要的参考。
🎯 应用场景
该研究具有广泛的应用前景,包括灾难响应、网络恢复、环境监测、智能农业等领域。通过将LLM集成到无人机系统中,可以实现自主数据处理、改进决策制定和加快响应速度,从而提高无人机在各种应用场景中的效率和可靠性。未来的发展将推动无人机在更多领域的应用,并带来更大的社会和经济效益。
📄 摘要(原文)
Unmanned Aerial Vehicles (UAVs) have emerged as a transformative technology across diverse sectors, offering adaptable solutions to complex challenges in both military and civilian domains. Their expanding capabilities present a platform for further advancement by integrating cutting-edge computational tools like Artificial Intelligence (AI) and Machine Learning (ML) algorithms. These advancements have significantly impacted various facets of human life, fostering an era of unparalleled efficiency and convenience. Large Language Models (LLMs), a key component of AI, exhibit remarkable learning and adaptation capabilities within deployed environments, demonstrating an evolving form of intelligence with the potential to approach human-level proficiency. This work explores the significant potential of integrating UAVs and LLMs to propel the development of autonomous systems. We comprehensively review LLM architectures, evaluating their suitability for UAV integration. Additionally, we summarize the state-of-the-art LLM-based UAV architectures and identify novel opportunities for LLM embedding within UAV frameworks. Notably, we focus on leveraging LLMs to refine data analysis and decision-making processes, specifically for enhanced spectral sensing and sharing in UAV applications. Furthermore, we investigate how LLM integration expands the scope of existing UAV applications, enabling autonomous data processing, improved decision-making, and faster response times in emergency scenarios like disaster response and network restoration. Finally, we highlight crucial areas for future research that are critical for facilitating the effective integration of LLMs and UAVs.